|
||||
|
|
Глава II Системы управления корабля Apollo 2.1. Реактивная система управления корабля Apollo. Общая характеристика системы управления Все 3 отсека корабля Apollo – командный отсек, служебный отсек и лунный корабль – имеют самостоятельные реактивные системы управления (рис. 21.1). 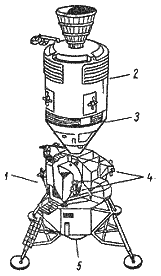 Рис. 21.1. Корабль Apollo: 1 – лунный корабль; 2 – служебный отсек; 3 – командный отсек; 4 – реактивная система управлений лунного корабля; 5 – посадочный ЖРД РСУ корабля Apollo имеет 44 специальных ЖРД. На всех отсеках корабля Apollo РСУ импульсного типа работают на системах подачи топлива под давлением, с 2-компонентным самовоспламеняющимся топливом. Полный импульс, создаваемый ЖРД РСУ при одном включении, может быть в пределах от 0,4 до 25 000 кг. сек. Некоторые ЖРД РСУ в процессе полета могут включаться до 10 000 раз. РСУ обеспечивает управление кораблем Apollo на всех этапах полета. РСУ служебного отсека управляет кораблем после его отделения от ступени S-IVB, на траектории полета Земля-Луна, при выходе на орбиту ИСЛ, после отделения лунного корабля управляет основным блоком (командный и служебный отсеки) на орбите ИСЛ и на траектории возвращения основного блока к Земле. РСУ лунного корабля осуществляет управление при посадке на Луну, при взлете второй ступени лунного корабля с Луны, во время встречи и стыковки с основным блоком. РСУ командного отсека управляет в процессе входа в атмосферу после отделения командного отсека от служебного. РСУ служебного отсека и лунного корабля кроме управления ориентацией могут осуществлять поступательные перемещения по всем трем осям. РСУ командного отсека управляет только ориентацией. РСУ могут работать на автоматическом режиме от цифрового автопилота (ЦАП) или на режиме ручного управления астронавтом. Реактивная система управления служебного отсека РСУ служебного отсека управляет ориентацией и поступательным перемещением с момента выхода корабля на траекторию полета к Луне до разделения командного и служебного отсеков. ЖРД РСУ служебного отсека могут работать в импульсном или непрерывном режиме. При импульсном режиме последовательно выдаваемый ЖРД минимальный импульс равен 0,18 кг·сек. Одновременно один ЖРД может быть включен на сравнительно продолжительный режим постоянной тяги, а остальные могут работать в импульсном режиме управления ориентацией. РСУ служебного отсека состоит из четырех самостоятельных независимо работающих подсистем – блоков, расположенных по окружности цилиндрической части служебного отсека, через 90°. Каждый блок имеет связку из четырех ЖРД радиационного охлаждения и самостоятельную систему наддува баков и подачи топлива. В каждой связке два ЖРД расположены по направлению продольной оси аппарата и два в поперечном направлении. Поперечные ЖРД создают момент, вращающий аппарат вокруг оси X и поступательные перемещения вдоль осей У и Z. Продольные ЖРД создают вращающие моменты вокруг осей Y и Z и поступательное перемещение вдоль оси X. Для осуществления управления, как правило, ЖРД включаются попарно. РСУ служебного отсека работает на 2-компонентном топливе, четырехокись азота (N2H4) используется в качестве окислителя и монометилгидразин (ММН) в качестве горючего, состав смеси (окислитель/горючее) равен 2. Каждый блок имеет запас топлива 147 кг; суммарный запас топлива для системы РСУ служебного отсека 588 кг. Все блоки РСУ служебного отсека работают идентично по схеме, приведенной на рис. 21.2. для одного блока. 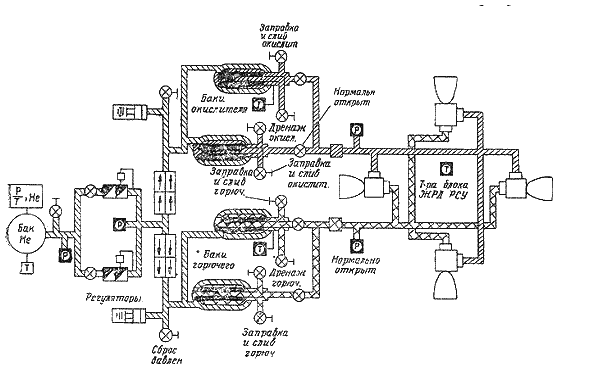 Рис. 21.2. Топливная система блока ЖРД реактивной системы управления служебного отсека В гелиевый бак сферической формы из титанового сплава (6А1—4V) заправляется газообразный гелий под давлением 290 кг/см?. В линии подачи гелия установлены изолирующие клапаны. Электромагнитные изолирующие клапаны, удерживаемые в открытом положении магнитным замком и в закрытом положении нагруженные пружиной, имеют электропереключатель, указывающий экипажу положение клапана. Высокое давление гелия двумя блоками параллельных регуляторов снижается до рабочего давления 12,7 кг/см?. Для обеспечения надежности системы в каждом блоке последовательно соединены 2 регулятора. Если один из регуляторов отказал в открытом положении, другой регулятор этого блока будет поддерживать рабочее давление в системе. Если один из регуляторов отказал в закрытом положении, то регуляторы параллельного блока обеспечат требуемое давление. Между регуляторами давления и входом в топливные баки установлены блоки последовательно-параллельных обратных клапанов и предохранительные клапаны. Обратные клапаны предохраняют систему от смешения испарившихся компонентов топлива. Каждый блок имеет 4 обратных клапана, соединенных в последовательно-параллельную цепь. Последовательное соединение препятствует смешению паров, а параллельное соединение обеспечивает необходимую подачу гелия в баки горючего и окислителя. Предохранительные клапаны защищают топливные баки от разрушения, если при изменении температуры сильно возрастает давление. Предохранительный клапан снабжен разрывной диафрагмой, герметизирующей систему и исключающей утечку гелия до возникновения перенаддува. Диафрагма разрывается при давлении 16 кг/см?, предохранительный клапан открывается при давлении 16,5 кг/см? и закрывается при давлении 15,5 кг/см?. Внутри каждого топливного бака имеется камера – мешок из тефлона, заполненная топливом. Когда бак наддувается, гелий поступает в полость между камерой и стенками бака, сжимает камеру и осуществляет подачу топлива в ЖРД. Все топливные баки РСУ Apollo выполнены по одной технологии из одинакового материала и с одинаковым диаметром 32 см. Баки имеют цилиндрическую форму и шарообразные днища, объем баков изменяется за счет длины цилиндрической части. В каждом блоке РСУ служебного отсека по 2 бака для горючего и по 2 бака для окислителя. Баки каждого из компонентов топлива соединены параллельно и работают в системе как один бак. В магистрали между топливными баками и ЖРД установлены электромагнитные изолирующие клапаны. Когда баки наддуты, изолирующие клапаны открыты и топливо поступает к клапанам ЖРД. В период обслуживания РСУ служебного отсека изолирующие клапаны закрыты. Они открываются в момент старта и открыты в течение всего полета. В топливных магистралях горючего и окислителя за изолирующими клапанами и перед входом в ЖРД установлены фильтры, предохраняющие инжекторы ЖРД от загрязнения. Количество топлива в баках РСУ служебного отсека определяется косвенным методом, посредством измерения количества гелия, вытекшего из гелиевого бака, в предположении отсутствия утечки гелия. Масса гелия, перетекшая в топливные баки, определяется разностью между начальной массой газа в баке и измеренным количеством газа, оставшегося в баке. Количество топлива в баках определяется разностью между объемом топливных баков и объемом гелия, перетекшего в топливные баки. Недостатком системы является отсутствие информации о составе смеси. Однако система простая и легкая, имеет единственный комбинированный датчик температуры и давления гелия. Реактивная система управления лунного корабля РСУ лунного корабля выполняет следующие функции. 1. Осуществляет отделение лунного корабля от основного блока. 2. Управляет ориентацией лунного корабля на активных и пассивных участках траектории полета. 3. Осуществляет поступательные перемещения при зависании лунного корабля перед посадкой на Луну. 4. Производит стыковку лунного корабля с основным блоком. В дополнение к основным функциям, в случае преждевременного выключения ЖРД двигательной установки взлетной ступени, РСУ лунного корабля может сообщить взлетной ступени дополнительную скорость, необходимую для выхода на траекторию ИСЛ. Для выполнения всех функций и с целью увеличения надежности РСУ лунного корабля выполнена в виде двух идентичных и самостоятельных систем А и В (рис. 21.3, 21.4). 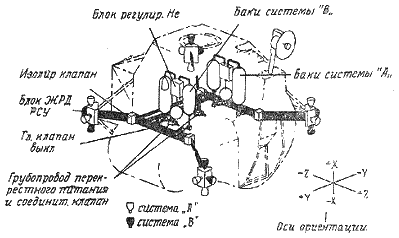 Рис. 21.3. Компановка топливной системы реактивного управления лунного корабля на взлетной ступени. Каждая из систем А и В имеет по 8 ЖРД, самостоятельную систему наддува баков и подачи топлива. Все ЖРД РСУ лунного корабля соединены по 4 ЖРД в четырех блоках, равномерно размещенных по периферии взлетной ступени. Два ЖРД в каждом блоке расположены параллельно оси Х и 2 ЖРД в плоскости, перпендикулярной оси X. Два ЖРД каждого блока нормально обеспечиваются топливом из системы А, другие 2 из системы В. Нормально обе системы работают одновременно, но каждая из систем может обеспечить управление лунным кораблем. Промежуточная линия с клапанами, соединяющая системы А и В, и линия, соединяющая топливную систему ЖРД взлетной ступени и РСУ, обеспечивают максимальную гибкость РСУ лунного корабля. РСУ лунного корабля работают на 3-компонентном топливе, в качестве окислителя используется N2O4 и в качестве горючего 50% смесь несимметричного диметилгидразина с гидразином. В топливных баках РСУ лунного корабля содержится 264 кг расходуемого топлива, кроме этого, в нормальных условиях полета РСУ лунного корабля расходует 82 кг топлива двигательной установки взлетной ступени. 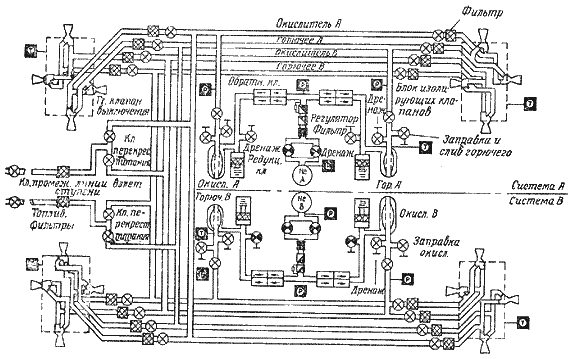 Рис. 21.4. Схема топливной системы реактивного управления лунного корабля. Многие агрегаты РСУ лунного корабля, регуляторы давления, обратные клапаны, предохранительные клапаны, гелиевый бак и топливные баки, по конструкции и действию подобны агрегатам РСУ служебного отсека. Гелиевый бак заполняется гелием под давлением 210 кг/см? (рис. 21.4), В магистрали подачи гелия установлены изолирующие пиротехнические клапаны, герметизирующие гелий под высоким давлением до активизации системы. Поток гелия, пройдя фильтры, последовательные регуляторы давления, последовательно-параллельные обратные клапаны, поступает в топливные баки, работающие так же, как топливные баки РСУ служебного отсека. Изолирующие клапаны в линии подачи топлива на выходе из баков, 2-ходовые соленоидного типа с магнитными замками, удерживающими клапан в открытом и закрытом положении, имеют индикаторы положения клапана. Такие же клапаны установлены в линии, соединяющей системы А и В, и в линии, соединяющей РСУ с топливной системой ЖРД посадочной ступени. В условиях нормального полета топливо из баков доходит до изолирующего клапана. После активации системы изолирующие клапаны открыты и топливо доходит до клапанов ЖРД. Если ЖРД отказывает, клапаны в линиях окислителя и горючего, изолирующие блок, закрываются и выключают 2 ЖРД этого блока. Клапаны в линиях, соединяющих системы А и В, при нормальных условиях полета закрыты; если нарушается работа одной из систем, клапаны открываются и ЖРД обеих систем могут работать, используя топливо противоположных систем. Когда РСУ лунного корабля питается топливом двигательной установки ЖРД взлетной ступени, главный изолирующий клапан закрыт, но перед выключением ЖРД взлетной ступени в соединительной магистрали клапан закрывается, а главный изолирующий клапан открывается. Эта операция критическая по времени и осуществляется таким образом, чтобы избежать образования газовых гелиевых пробок в трубопроводах РСУ лунного корабля. Реактивная система управления командного отсека РСУ командного отсека выдает импульсы, необходимые для управления ориентацией командного отсека при входе в атмосферу Земли на этапе от момента отделения командного отсека от служебного до начала раскрытия парашютной системы. Кроме номинального режима полета РСУ командного отсека осуществляет управление на всех режимах аварийного возвращения командного отсека. РСУ командного отсека состоит из двух независимых систем А и В. Каждая из систем А и В имеет по 6 ЖРД абляционного охлаждения, самостоятельную систему наддува баков и подачи топлива. Все оборудование РСУ командного отсека расположено под герметической кабиной экипажа в задней части командного отсека. В нормальных условиях полета обе системы А и В работают одновременно, однако, каждая система может обеспечить все управление командным отсеком (рис. 21.5). 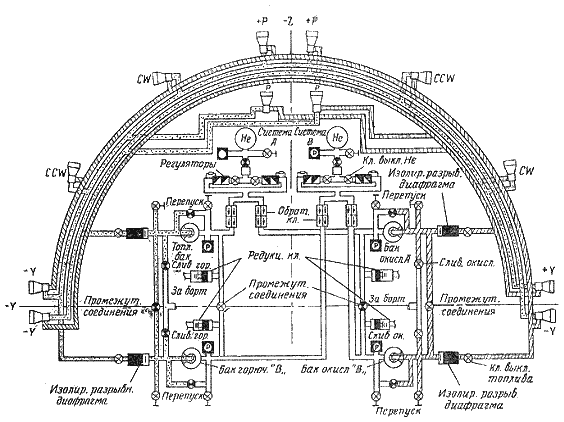 Рис. 21.5. Схема топливной системы реактивного управления командного отсека. Каждая из РСУ командного отсека идентична блоку РСУ служебного отсека, за исключением того, что РСУ командного отсека имеет дополнительно соединительные линии и перепускные клапаны для осуществления слива топлива и инертного газа перед посадкой командного отсека. Большинство важных деталей РСУ командного отсека сгруппировано на панелях. При неисправностях вся панель снимается и заменяется запасной. На выходе из гелиевого бака в линии подачи гелия установлено 2 изолирующих пироклапана, они закрыты до момента отделения командного отсека перед входом в атмосферу. После открытия пироклапанов гелий проходит регуляторы, снижающие давление до 20,8 кг/см? и поступает в газовую полость топливных баков, работающих так же, как баки РСУ служебного отсека. До активизации системы топливо в баках изолируется от ЖРД разрывными диафрагмами. После активизации системы (открытие пироклапанов, изолирующих гелий под высоким давлением) увеличивается давление,которое разрывает диафрагмы в топливных магистралях, и топливо поступает к клапанам ЖРД. Чтобы обеспечить слив топлива и гелия из РСУ перед посадкой командного отсека, в системе имеются пиротехнические клапаны, соединяющие гелиевые магистрали системы А и В, пиротехнический перепускной клапан, открывающий доступ гелию внутрь камеры топливного бака для вытеснения остатков топлива, пиротехнические клапаны, соединяющие топливные магистрали системы А и В, пиротехнические клапаны, открывающие сливные отверстия из системы. ЖРД РСУ командного отсека существенно отличаются от ЖРД РСУ служебного отсека. ЖРД реактивной системы управления служебного отсека и лунного корабля ЖРД РСУ служебного отсека и лунного корабля с тягой 45,5 кг импульсного типа, радиационного охлаждения, работающие на монометилгидразине или 50% смеси гидразина и несимметричного диметилгидразина в качестве горючего и N2O4 в качестве окислителя, квазиустановившееся давление в камере сгорания 7 кг/см?. Вес ЖРД 2,27 кг. ЖРД состоит из двух частей – камеры сгорания с соплом, оканчивающимся сечением с отношением площадей 7:1, и удлинительного сопла (рис. 21.6). Камера сгорания, механически обработанная из молибденовой поковки с кварцевым покрытием, предохраняющим молибден от окисления. 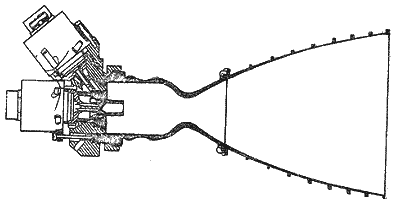 Рис. 21.6. ЖРД реактивной системы управления служебного отсека и лунного корабля Удлинительное сопло из кобальтового сплава с восемью кольцами жесткости по наружной поверхности. Инжектор из алюминиевого сплава и нержавеющей стали с отверстиями постоянного сечения. В конструкции ЖРД имеется воспламенительная предкамера, возбуждающая горение и сводящая к минимуму детонацию, так как сильные скачки давления могут разрушить ЖРД. Детонация гасится путем опережения впрыска горючего в камеру на несколько миллисекунд до окислителя. Внутри предкамеры 2 отверстия для окислителя и горючего. При открытии инжекторных клапанов поток топлива по прямому каналу поступает в предкамеры и возбуждает горение, остальное топливо поступает к отверстиям, окружающим предкамеры. Вследствие гидравлического запаздывания в инжекторе воспламенение этого топлива происходит на 3 мсек позднее, чем внутри предкамеры. Топливные инжекторные клапаны должны быстро реагировать на электрические команды «открыто», «закрыто», и обеспечивать герметическое закрытие без просачивания топлива (рис. 21.7). Клапаны монтируются непосредственно на инжекторе, имеют соленоиды с отдельными электросистемами для автоматического и ручного управления. После поступления на ЖРД команды «открыть» топливные клапаны, проходит 9 мсек до полного открытия, поток топлива достигает камеры сгорания через 11 мсек и через 12 мсек после команды «открыть» возникает горение. 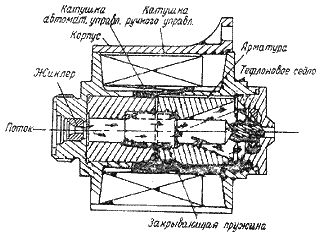 Рис. 21.7. Топливный инжекторный клапан Характеристики ЖРД РСУ служебного отсека и лунного корабля приводятся на рис. 21.8 а,б. 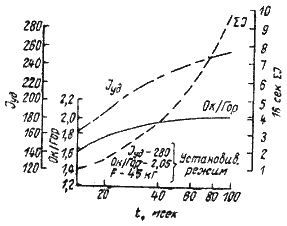 Рис. 21.8 (а). Характеристики ЖРД реактивной системы управления служебного отсека и лунного корабля. Удельный импульс; суммарный импульс; состав смеси в функции времени 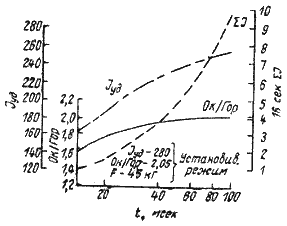 Рис. 21.8 (б). Тяга ЖРД в функции времени ЖРД реактивной системы управления командного отсека ЖРД РСУ командного отсека с тягой 42,2 кг абляционного охлаждения работают на монометилгидразине и N2O4, ква-зиустановившееся давление в камере сгорания 10,5 кг/см?. Вес ЖРД 4,08 кг (рис. 21.9). ЖРД работают главным образом в импульсном режиме, но могут использоваться и в режиме постоянной установившейся тяги. Два топливных инжекторных клапана той же конструкции, что и клапаны ЖРД РСУ командного и служебного отсеков, управляют подачей горючего и окислителя. [1—18] 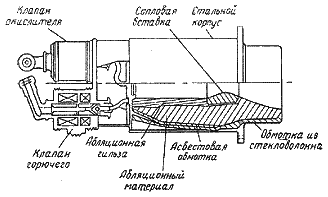 Рис. 21.9. ЖРД реактивной системы управления командного отсека 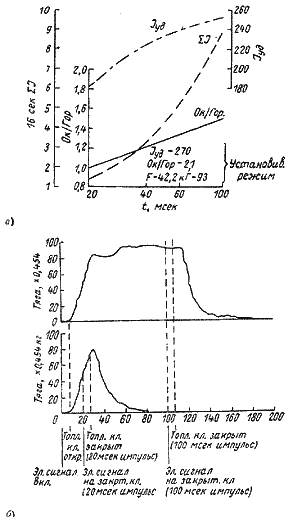 Рис. 21.10. Характеристики ЖРД реактивной системы управления командного отсека. (а). Удельный импульс, суммарный импульс и состав смеси в функции времени. (б). Тяга ЖРД в функции времени. Характеристики ЖРД РСУ командного отсека на рис. 21.10а,б. 2.2. Цифровой автопилот космического корабля Apollo Впервые в условиях пилотируемого космического полета цифровой автопилот (ЦАП) был применен на космическом корабле Apollo. Анализ результатов полетов кораблей Apollo с ЦАП показывает хорошее совпадение прогнозируемых и наблюдаемых процессов управления. Первое применение ЦАП на космическом корабле показало, что он во многих отношениях превосходит аналоговые автопилоты, не только обеспечивает требуемые динамические характеристики, но и обладает многими свойствами, недоступными аналоговой системе. К этим свойствам относятся автоматическая оценка и коррекция эксцентриситета вектора тяги, автоматическое изменение коэффициентов усиления по мере выгорания топлива, возможность осуществления различных режимов управления. Общее описание работы цифрового автопилота На активных участках траектории полета управление аппаратом по каналам тангажа и рыскания осуществляется отклонением на кардане ЖРД служебного отсека. Управление ориентацией по каналу крена производится ЖРД реактивной системы управления. Расчет команд на отклонение вектора тяги для компенсации ошибок между требуемой и измеренной ориентацией является функцией управления вектором тяги цифрового автопилота. Управление вектором тяги ЦАП по каналам тангажа и рыскания осуществляется следующим образом. 1. В контуре управления траекторией полета бортовой ЭЦВМ командного отсека подсчитываются приращения углов ориентации в инерциальной системе координат и преобразуются в координаты, связанные с аппаратом. 2. Блок преобразования данных измеряет углы кардана блока инерциальных измерений и формирует импульсы, представляющие малые фиксированные приращения этих углов. Приращения углов суммируются в бортовой ЭЦВМ командного отсека и отсылаются в регистр блока преобразования данных. 3. В регистре блока преобразования данных, в соответствии с программой ЦАП производится квантование и по обратной разности углов блока преобразования данных на каждом интервале находятся малые приращения. 4. Приращения величин в блоке преобразования данных на каждом интервале квантования преобразуются в координаты, связанные с аппаратом, и вычитаются из командных приращений, которые вырабатываются по программе управления траекторией полета. 5. Полученная разность представляет собой приращение ошибок ориентации; эти приращения суммируются и дают ошибку ориентации в координатах, связанных с аппаратом. Небольшие ошибки начальной ориентации, возникающие в результате выполнения маневра осадки топлива перед запуском ЖРД служебного отсека не учитываются и обнуляются в регистре ЦАП Apollo перед запуском ЖРД. Это делается с той целью, чтобы исключить возбуждаемые начальными ошибками изгибные колебания Apollo. Когда лунный корабль отстыкован от основного блока, проблемы изгибных колебаний не возникает и начальные ошибки ориентации учитываются точно. 6. Ошибки ориентации поступают в фильтры компенсации каналов тангажа и рыскания ЦАП, в которых вырабатываются команды сервомотором кардана ЖРД для углов тангажа и рыскания (рис. 22.1). Эти компенсирующие сигналы должны также обеспечить демпфирование изгибных колебаний аппарата и колебаний в результате плескания топлива. 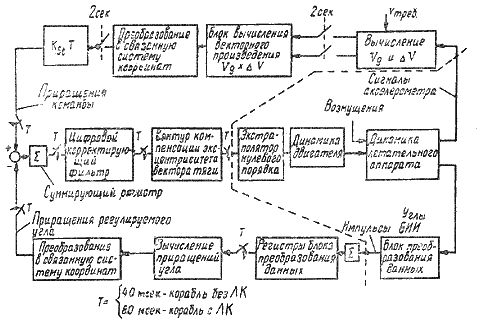 Рис. 22.1. Функциональная блок-схема управления вектором тяги в плоскости тангажа (или рыскания). 7. ЦАП Apollo имеет два компенсирующих режима работы: первый с широким диапазоном для стабилизации аппарата от плескания при полной заправке, требующейся для полета на Луну, второй – узкий диапазон для стабилизации от плескания топлива при любых заправках. ЦАП начинает управление вектором тяги в широком диапазоне и остается на этом режиме до тех пор, пока астронавт не переключит его на режим работы в узком диапазоне. Он осуществляет переключение с помощью кодового слова, набираемого на клавишах пульта управления. Это переключение астронавт осуществляет, когда плескание топлива приводит к чрезмерным колебаниям ЖРД. Таким образом извлекается максимум преимуществ из широкого диапазона в начале неустойчивого режима управления вектором тяги. 8. ЦАП командного и служебного отсеков имеет только один компенсирующий режим работы. 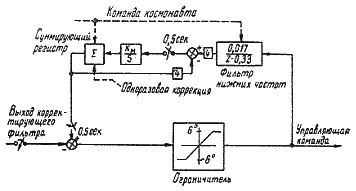 Рис. 22.2. Функциональная блок-схема контура коррекции эксцентриситета тяги в плоскости тангажа (или рыскания). 9. Как показано на рис. 22.2, суммарный командный сигнал к каждому серводвигателю кардана складывается из сигнала компенсирующего фильтра и сигнала контура коррекции смещения вектора тяги. Последняя составляющая смещает суммарный командный сигнал таким образом, что при нулевом выходе из компенсирующего фильтра вектор тяги проходил бы точно через центр тяжести, если отсутствует движение центра тяжести и вектора тяги относительно командного угла. 10. Контур управления вектором тяги состоит из двух главных элементов – суммирующего регистра, выдающего смещение, и низкочастотного фильтра, проводящего суммарный командный сигнал с частотой квантования ЦАП. Разность между величиной смещения и выходным сигналом низкочастотного фильтра вводится на суммирующий регистр каждые 0,5 сек с тем, чтобы медленно корректировать ошибки регулирования, вызванные эксцентриситетом вектора тяги. Это в некоторой степени эквивалентно введению пропорционально-интегральной передаточной функции между компенсирующим фильтром и суммарным сигналом управления. Контур управления вектором тяги работает таким образом, что его сигналы не возбуждают колебаний топлива и изгибных колебаний и мало влияют на устойчивость космического аппарата как твердого тела. 11. Астронавт задает начальные условия суммирующему регистру контура коррекции смещения вектора тяги и низкочастотному фильтру перед началом управления вектором тяги. Позднее начальные условия суммирующему регистру задают снова, чтобы осуществить так называемую одноразовую корреляцию. 12. Если ЦАП управляет основным блоком, величина в суммирующем регистре контура коррекции смещения вектора тяги не изменяется до осуществления одноразовой коррекции через 3 сек после запуска ЖРД. Эта коррекция состоит в добавлении к содержимому суммирующего фильтра удвоенного изменения выходного сигнала низкочастотного фильтра (удвоение сигнала необходимо для компенсации запаздывания фильтра). Следуя такой коррекции, содержимое суммирующего фильтра контура коррекции смещения вектора тяги изменяется каждые 0,5 сек, как показано на рис. 22.3. 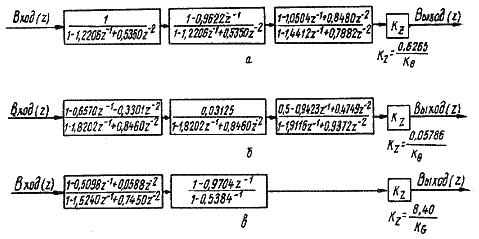 Рис. 22.3. Структурная схема компенсирующего фильтра цифрового автопилота: а – корабль Apollo, широкий диапазон работы; б – корабль Apollo, узкий диапазон работы; в – основной блок 13. В ЦАП Apollo возрастание содержимого в суммирующем регистре контура коррекции смещения вектора тяги начинается с момента запуска ЖРД. Однако суммирующий регистр обнуляется при переключении режимов на текущее значение выходного сигнала низкочастотного фильтра. Предполагается, что переключение происходит после начального неустановившегося режима низкочастотного фильтра. При переключении режимов низкочастотный фильтр обнуляется и поступающая на сервомоторы команда сдвигается к сигналу суммирующего регистра контура коррекции смещения вектора тяги. После переключения контур коррекции смещения вектора тяги продолжает работать с теми же коэффициентом усиления, частотой квантования и постоянной времени низкочастотного фильтра. 14. Если ЦАП управляет основным блоком, то в контуре управления траекторией полета коэффициент усиления остается постоянным. Когда ЦАП управляет кораблем Apollo, то при переключении режимов коэффициент усиления в контуре управления траекторией полета уменьшается. Канал ЦАП управления вектором тяги по крену обеспечивает ориентацию и управление угловой скоростью относительно оси крена с помощью ЖРД РСУ. Его задача сводится к сохранению ориентации основного блока на активных участках траектории полета в пределах установленной зоны нечувствительности. Углы наружной рамки кардана стабилизированной платформы, которая параллельна оси крена, считываются, обрабатываются и дают приближенно ориентацию и угловую скорость. Для выработки команд на включение ЖРД РСУ используется логика переключения в фазовой плоскости. Канал ЦАП управления вектором тяги по крену играет сравнительно малую роль, главную роль в управлении тягой и скоростью полета космического корабля играют каналы тангажа и рыскания. Требования, предъявляемые к цифровому автопилоту Основным требованием, предъявляемым к каналам тангажа и рыскания ЦАП, является обеспечение совместно с внешним контуром управления траекторией полета малых ошибок по скорости в момент выключения двигателя. ЦАП должен ограничивать движение аппарата вокруг центра масс и изменение ориентации вектора тяги для того, чтобы минимизировать расход топлива и износ муфт сервоприводов, а также облегчить астронавтам управление кораблем. ЦАП должен выполнять программы, включаясь при неизвестных начальных условиях и при изменяющихся характеристиках аппарата на активном участке траектории полета. В момент запуска ЖРД служебного отсека могут возникнуть начальные возмущения, которые должно преодолеть управление вектором тяги ЦАП. 1. В результате осуществления маневра осадки топлива перед запуском ЖРД служебного отсека, начальные угловые скорости по тангажу и рысканию могут достигнуть 1 град/сек. 2. Результаты космических летных испытаний показывают, что плескание топлива вызывает колебания ориентации аппарата до 0,1 град/сек в момент запуска ЖРД служебного отсека. 3. Начальное продольное перемещение топлива (если не осуществлен маневр осадки топлива). 4. Перед запуском ЖРД служебного отсека бортовая ЭЦВМ командного отсека выдает сигнал на регулировку сервомоторов кардана и совмещение направления вектора тяги с расчетным положением центра тяжести. Но могут быть ошибки совмещения, являющиеся следствием неопределенности ориентации вектора тяги и неопределенности положения центра тяжести. Утроенное среднеквадратичное значение угла эксцентриситета вектора тяги изменяется от 1,4° (полный) до 0,98° (пустой) для основного блока и от 1,25° (полный) до 0,71° (пустой) для корабля Apollo. Максимальная расчетная скорость изменения угла эксцентриситета вектора тяги для корабля Apollo 0,003 град/сек в плоскостях тангажа и рыскания. Для основного блока эта скорость составляет 0,0083 град/сек в плоскости тангажа и 0,014 град/сек в плоскости рыскания. Характеристики космического корабля Apollo Динамические характеристики корабля Apollo существенно отличаются от характеристик основного блока, поэтому потребовалась разработка двух самостоятельных программ для ЦАП, управляющего обоими аппаратами. Основные различия характеристик аппаратов состоят в следующем. 1. Частота изгибных колебаний корабля Apollo~2 гц, частота изгибных колебаний основного блока ~ 5 гц. 2. Отличия в плечах управляющей силы, положения центра тяжести и моментах инерции таковы, что при одном и том же отклонении ЖРД служебного отсека угловое ускорение основного блока в 4 раза больше углового ускорения корабля Apollo. 3. Влияние плескания топлива в баках корабля Apollo существенно отличается от влияния плескания топлива в баках основного блока из-за дополнительных масс жидкости, различных моментов инерции и положения центра тяжести. Аналитическое описание цифрового автопилота Построение каналов тангажа и рыскания управления вектором тяги ЦАП может быть выполнено с помощью частотных характеристик разомкнутой системы. Эти характеристики выражаются членами функции разомкнутой цепи  которая описывает ЦАП с разомкнутой цепью на входе в компенсирующий фильтр. Сомножители правой части уравнения (22.1) соответственно представляют частотные характеристики компенсирующего фильтра, контура компенсации эксцентриситета тяги, системы ЖРД-аппарат, параллельной комбинации обратной связи управления ориентацией ЦАП и управления траекторией полета. Частотные характеристики ЦАП могут быть представлены произведением  2 других сомножителя благодаря соответствующему выбору параметров близки к единице. С целью выбора корректирующих фильтров удобно перейти от частотных характеристик в области реальных частот D*(j?) и G*(j?) к эквивалентным частотным характеристикам D (ju) и G (ju) в ?-области. Прежде всего отметим, что D(ju) и G (ju) получаются путем подстановки ?=ju в ?-преобразование  Эти ?-преобразования затем подвергаются z–преобразованиям. После этого с помощью подстановки z=esT могут быть получены частотные характеристики в области реальных частот.  Аналогично эти характеристики могут быть получены из ?-преобразования путем z–?-преобразований:  откуда угол  или  Таким образом  Использование частотных характеристик D(ju) и G(ju) предпочтительнее, чем характеристик D*(j?) и G*(j?), так как их легче выразить аналитически и перевести в z–область для реализации бортовой ЭЦВМ. Кроме того, соотношение u=tg(?T/2) легко использовать для определения значений, соответствующих критическим частотам изгибных колебаний и колебаний от плескания жидкости. Частота квантования ЦАП,  выбирается таким образом, чтобы ее половина значительно превышала резонансные частоты колебаний корабля Apollo и основного блока. Из характеристик G (ju) или G*(j?)), выделяя сомножители, обусловленные изгибными колебаниями и плесканием жидкости, получим чистую характеристику аппарата, как твердого тела Gr(ju) или С*r(j?). Компенсирующие звенья могут быть спроектированы на основе произведения D(ju)Gr(ju), эквивалентного D*(j?) G*r(j?), с добавлением к этим частотным характеристикам функций влияния плескания топлива и изгибных колебаний при различных количествах топлива в баках. Процесс проектирования упрощается использованием программы для вычислительной машины, которая строит амплитудные и фазовые характеристики D(ju)Gr(ju) в функции ?=(2/T)tg^-1u (22.10) В результате получаются графики D*(j?) G*r(j?), которые модифицируются с помощью функций M(j?) и Н(j?) для определения разомкнутой частотной характеристики аппарата как твердого тела G0r(j?)=D*(j?) M(j?) G*r(j?)Н (j?) (22.11) Контур компенсации эксцентриситета вектора тяги Влияние контура компенсации эксцентриситета вектора тяги на характеристики разомкнутой цепи ЦАП по конструктивным соображениям ограничивается областью ниже 2 рад/сек. Это значительно ниже частоты квантования интегратора этого контура, равной 2 гц (12,56 рад/сек), и частоты квантования ЦАП (25 гц для основного блока и 12,5 гц для корабля Apollo). Можно показать, что влияние указанных частот квантования пренебрежимо мало в диапазоне частот до 2 рад/сек, и контур компенсации эксцентриситета вектора тяги может быть аппроксимирован передаточной функцией непрерывного сигнала вида  где Км – коэффициент усиления контура компенсации эксцентриситета вектора тяги; Тм – постоянная времени низкочастотного фильтра. Контур управления траекторией полета Динамика контура управления траекторией полета зависит от времени до окончания работы ЖРД, tgo. Для больших значений tgo этой зависимостью можно пренебречь при выводе передаточных функций контура управления траекторией полета. Эти функции даже в приближенном виде весьма полезны для понимания влияния контура управления траекторией полета на работу ЦАП в целом. Контур управления траекторией полета выполняет следующие операции. 1. Приращения скорости, измеряемые акселерометром, накапливаются и вычисляется текущая скорость V; 2. Каждые 2 сек вычисляется разность Vg между требуемой скоростью Vr и текущей скоростью V. 3. Каждые 2 сек находится векторное произведение Vg и ?V, где ?V – изменение скорости в течение последних 2 сек. 4. Результат векторного произведения нормируется по отношению Vg и ?V и затем умножается на коэффициент усиления Ksteer для получения вектора команды скорости ориентации. 5. Вектор угловой скорости ориентации преобразуется п-систему координат, связанных с аппаратом, и определяются команды для угловых скоростей тангажа и рыскания. 6. Управляющие команды по угловой скорости аппарата умножаются на период квантования ЦАП Т, чтобы получить-приращения, которые подаются в ЦАП через каждые Т сек. Приближенные аналитические соотношения, описывающие-динамику контура управления траекторией полета выводятся при следующих допущениях: 1) все тригонометрические функции заменяются их приближенными значениями для малых углов; 2) аппарат рассматривается как твердое тело с инерци-альной измерительной платформой, установленной в центре тяжести; 3) эффекты квантования пренебрежимо малы; 4) ось X аппарата и ось ЖРД первоначально выставлены параллельно вектору скорости Vr; в этом случае угол между вектором тяги и вектором Vr определяется как ? – ? (? – ориентация аппарата относительно вектора Vr, ? – отклонение ЖРД от начального направления; считается положительным, если создает положительное ускорение ?); 5) время tgo постоянно; 6) вектор Vr постоянен по величине и направлению; 7) запаздывание при вычислении в контуре управления траекторий полета пренебрежимо мало. При сделанных допущениях угол между вектором тяги и вектором требуемой скорости определяется как ? – ?, а соответствующие углы в плоскости тангажа и в плоскости рыскания для векторов Vg и ?V аппроксимируются выражениями  (Ts – период квантования контура управления траекторией полета 2 сек). Нормированное векторное произведение векторов Vg и ?V дает разность ?vg – ??V, которая после умножения на коэффициент усиления Kst дает сигнал по угловой скорости ориентации . Эта команда по угловой скорости поступает в ЦАП в виде приращения ?cT, находится разность между командным и измеренным приращением для определения ошибки ориентации. Таким образом, ?c образуется путем квантования с периодом 2 сек непрерывного интеграла от ?—? и последовательного преобразования в приращения, которые суммируются на интервале в Т сек. Такая комбинация двух периодов квантования и аналогичного интегрирования усложняет задачу учета влияния контура управления траекторией полета на устойчивость ЦАП. Для упрощения анализа влияния управления траекторией полета автопилот можно рассматривать как элемент с непрерывным сигналом в контуре управления траекторией полета. Тогда остается только одна частота квантования 0,5 гц, связанная с формированием управляющего сигнала ?c. Частотную характеристику разомкнутого контура управления траекторией полета можно представить ?-преобразованием  где F1(?)-преобразование  F2(?) представляет процесс получения угла векторного произведения ?vg – ??V из интеграла (?—?); F1(?) описывает умножение этого угла на коэффициент усиления Kst для получения ?c, последующее интегрирование ?c для получения ?c', образования разности (?—?) автопилотом и ее интегрирование. Взаимное влияние автопилота и процесса управления траекторией полета проявляется более наглядно с помощью приближенного аналитического метода, заключающегося в добавлении к частотной характеристике разомкнутого контура ЦАП влияния управления траекторией полета. При этом предполагается, что эффекты транспонирования частот отсутствуют и частотная характеристика F1(?) может быть заменена частотной характеристикой в области реальных частот  а также имеет место  где Кr – коэффициент эффективности управления системы ЖРД-аппарат. В предположении, что  F2(?) примет вид  Частотная характеристика разомкнутого контура управления траекторией полета может быть представлена в виде  где  В области низких частот, где применима функция Gst(j?), влияние управления траекторией на характеристики разомкнутого контура ЦАП можно аппроксимировать путем прибавления Gst(j?) к единичному коэффициенту обратной связи по углу ориентации  Следует заметить, что выражение H(j?) является хорошей аппроксимацией только для низких значений ?, меньше 0,2 рад/сек. Однако именно этот диапазон частот представляет наибольший интерес при анализе эффектов управления траекторией полета. Стабилизация корабля Apollo Необходимость стабилизации корабля при возникновении изгибных колебаний или плескания жидкости является одним из основных требований, предъявляемых к ЦАП. Для стабилизации корабля как твердого тела в ЦАП были приняты следующие значения запасов устойчивости:  Указанные значения критериев устойчивости выбраны в предположении, что коэффициент усиления автопилота автоматически изменяется и компенсирует изменение характеристик цепи ЖРД-аппарат при выгорании топлива. Для стабилизации корабля при возникновении изгибных колебаний или плескания жидкости в передаточной функции вводятся сомножители, расположенные вблизи от мнимой оси и соответствующих нулей. Коэффициент усиления разомкнутой системы пропорционален произведению коэффициента усиления фильтра ЦАП Kz и квазистатического коэффициента цепи ЖРД-аппарат Kg, где   – передаточная функция ЖРД-аппарат.(22.26) Kg зависит от количества топлива и изменяется по мере его выгорания. Эти изменения компенсируются обратнопропорциональным изменением коэффициента Kz, так чтобы общий коэффициент усиления контура оставался неизменным. Таким образом устойчивость корабля как твердого тела при возникновении изгибных колебаний и плескании жидкости обеспечивается выбором компенсирующего фильтра. На режиме широкого диапазона работы фильтр обеспечивает стабилизацию корабля от изгибных колебаний путем создания фазового запаздывания на низких частотах и затухания на высоких частотах. Стабилизация корабля от плескания жидкости осуществляется за счет создания фильтром фазового опережения. Компенсирующий фильтр обеспечивает стабилизацию корабля за счет фазового запаздывания при изгибных колебаниях с частотами ниже 8,4 рад/сек. При этом запас устойчивости на резонансной частоте составляет 35°. На режиме широкого диапазона работы обеспечивается стабилизация корабля при возникновении любых плесканий жидкости в баках корабля. Этот случай соответствует номинальным условиям – полному заполнению баков корабля. Максимальная частота плескания жидкости, при которой обеспечивается стабилизация корабля, составляет 4,075 рад/сек, что на 20% превышает максимум частоты для номинальных условий, равный 3,4 рад/сек. На режиме узкого диапазона работы фильтр обеспечивает стабилизацию корабля от высокочастотных плесканий жидкости при неполных баках созданием затухания до 57 дб. Стабилизация корабля от частоты плескания жидкости, которая ниже 2,08 рад/сек, осуществляется за счет фазового запаздывания. Затухание изгибных колебаний осуществляется более чем на 100 дб. Параметры конструкции цифрового автопилота Для обоих конфигураций летательного аппарата, корабля Apollo и основного блока в ЦАП используется компенсирующий фильтр шестого порядка, состоящий из трех каскадных секций второго порядка. В ЦАП корабля Apollo используются все 3 секции, на основном блоке только 2. Структура и параметры компенсирующих фильтров ЦАП представлены на рис. 22.4. 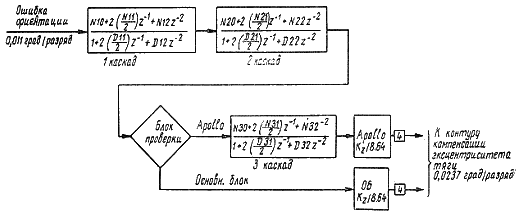 Рис. 22.4. Структурная схема компенсирующего фильтра шестого порядка цифрового автопилота. В табл. 17 приведены численные значения параметров контуров управления траекторией полета и компенсации эксцентриситета вектора тяги [20]. Таблица 17  2.3. Ручное управление кораблем Apollo На всех этапах полета корабля Apollo, а также в критических и аварийных ситуациях управление кораблем может осуществляться астронавтами вручную. Система ручного управления обеспечивает стабилизацию полета по курсу, координированные развороты, команды на ориентацию и перемещение корабля в пространстве. Отличительная особенность ручного управления лунного корабля в сравнении с другими летательными аппаратами состоит в том, что его динамические характеристики изменяются в широких пределах. 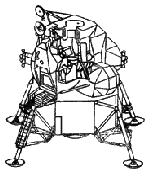 Рис. 23.1. Лунный корабль (посадочная конфигурация). 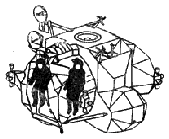 Рис. 23.2. Взлетная ступень. Лунный корабль управляется вручную во всех трех конфигурациях (рис. 23.1, 2, 3). В посадочной конфигурации один лунный корабль с полным запасом топлива весит 15 т и имеет моменты инерции относительно осей крена, тангажа и рыскания 34 000; 33 900 и 31 200 кг·м? соответственно, когда израсходована половина запаса топлива. Моменты инерции уменьшаются до 20 300; 16 800; 16 200 кг·м? при полностью израсходованном топливе посадочной ступени. Взлетная ступень лунного корабля весит 4900 кг с полным запасом топлива и 2600 кг, когда топливо израсходовано. Начальные моменты инерции 8250; 4700 и 9100 кг·м? уменьшаются после израсходования топлива до 2800; 3900 и 4400 кг·м?. 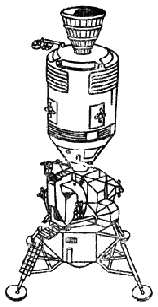 Рис. 23.3. Корабль Apollo. Лунный корабль, состыкованный с основным блоком с полным запасом топлива при весе 42 800 кг имеет момент инерции относительно оси рыскания 56 000 кг·м?, моменты инерции относительно осей крена и тангажа 676 000 и 671 000 кг·м?, соответственно. В нормальных условиях полета Apollo моменты инерции могут изменяться в отношении 12 : 1, в аварийных ситуациях это отношение может возрасти до 243 : 1. Ручное управление лунным кораблем астронавты осуществляют с помощью: рукояток ориентации и перемещения, бортовой ЭЦВМ, ЦАП, пульта управления и шарового индикатора полета. Ручное управление ориентацией использует только ЖРД РСУ. Каждый ЖРД РСУ оси рыскания создает момент 695 н·м?, а каждый ЖРД крена и тангажа создают моменты по 746 н·м?. Общее количество топлива на ЖРД РСУ составляет 267 кг, расход топлива на один ЖРД 0,16 кг/сек. ЖРД РСУ неэффективно работают при включении на очень короткие промежутки времени, топливо не полностью расходуется и может скапливаться в магистралях и камерах сгорания. Поэтому минимальный импульс был установлен 14·10? сек. Этот импульс определяет конечную угловую скорость, которая изменяется в зависимости от конфигурации аппарата. Шаровой индикатор полета – это сфера с тремя степенями свободы, указывающая ориентацию и направление полета корабля; угловые скорости и ошибки ориентации указываются стрелками на фронтальной поверхности прибора вокруг сферы. Трехосевая рукоятка управления ориентацией на выходе имеет 800 гц и напряжение, пропорциональное отклонению. От центрального положения до отклонения рукоятки на 2° – мертвый ход, отклонение на 10° до мягкого упора соответствует « полному ходу» рукоятки и напряжение на выходе равно 42 делениям. При отклонении рукоятки за мягкий упор, напряжение на выходе и число делений шкалы напряжения продолжают рости до жесткого стопора на 13° (рис. 23.4). 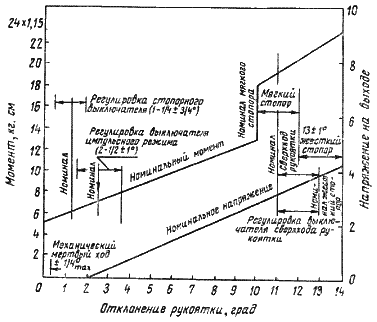 Рис. 23.4. Характеристика ручного управления Управление ориентацией, перемещением с использованием ЖРД РСУ осуществляется с помощью бортовой ЭЦВМ лунного корабля по программам ЦАП. Ручное управление ориентацией использует эти же коды ЦАП, которые занимают 11% памяти бортовой ЭЦВМ. Экипаж селектором может устанавливать любой из трех режимов работы ЦАП: «автоматическое управление», «ручное управление», «выключено». В последнем режиме ЦАП выполняет только программу прерывания. Режим «автоматического управления» устанавливается, когда осуществляется посадка с работающим ЖРД посадочной ступени, требующая автоматического выполнения маневров. Однако на этом режиме экипаж с помощью рукоятки может корректировать полет корабля по оси Х, пересиливая ЦАП. Во время выполнения ЦАП программы Р-64, отклоняя рукояткой управления корабль по тангажу и крену, дискретно изменяют угол наклона траектории и направление полета, ведя корабль к выбранному месту посадки. При этом ЦАП поддерживает оптимальный режим полета. Если селектор ЦАП установлен на режим «ручное управление», астронавты с помощью рукоятки могут управлять кораблем относительно всех трех осей. Экипаж, набирая необходимый код на пульте управления бортовой ЭЦВМ, может по желанию менять характеристики ЦАП, чувствительность рукоятки управления (нормальное или точное управление), ширину зоны нечувствительности при управлении ориентацией (узкая или широкая). Нормальной чувствительности рукоятки соответствует максимальная командная угловая скорость 20 град/сек при отклонении рукоятки на 1/2 деления шкалы; при точном управлении такому же отклонению рукоятки соответствует командная угловая скорость 4 град/сек. Цена деления шкалы рукоятки управления 0,476 и 0,095 град/сек/деление. [5, 6, 17, 22.] 2.4. Цифровой автопилот лунного корабля Цифровой автопилот лунного корабля обеспечивает управление на активных и пассивных участках траектории полета всех трех конфигураций: посадочной (рис. 23.1), взлетной (рис. 23.2) и всего корабля Apollo (рис. 23.3). Характеристики летательного аппарата Лунный корабль имеет три основных источника управляющих сил и моментов: ЖРД посадочной и взлетной ступени и ЖРД реактивной системы управления. В табл. 18 приведены характеристики управляющих сил и моментов. ЖРД РСУ обеспечивают ручное и автоматическое управление ориентацией и малые поступательные перемещения для всех конфигураций летательного аппарата на пассивных участках траектории полета. На активных участках траектории полета с помощью ЖРД РСУ осуществляются управление ориентацией и стабилизация, причем включаются те ЖРД РСУ, которые создают приращение скорости в желаемом направлении. Так как ЖРД взлетной ступени имеет вектор тяги, постоянный по направлению, закон управления ЖРД РСУ приспособлен к парированию больших и переменных по времени возмущающих моментов на активном участке траектории полета взлетной ступени. Таблица 18 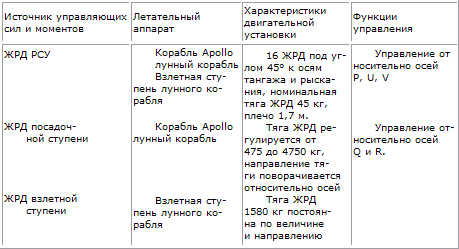 Во время работы ЖРД посадочной ступени управление ориентацией относительно оси рыскания Р осуществляется ЖРД РСУ, а относительно осей тангажа Q и крена R путем сочетания ЖРД РСУ и отклонения на кардане ЖРД посадочной ступени. Расположение и ориентация ЖРД РСУ такова, что если центр тяжести летательного аппарата лежит вблизи геометрического центра 16 ЖРД РСУ (что соответствует взлетной ступени), тогда 8 «Р ЖРД», создающие тягу в направлении У или Z, дают момент, только относительно оси Р, 4 «U ЖРД», действующие в направлении ±Х, создают момент только относительно оси U и 4«V ЖРД», действующие в направлении ±Х, создают момент только относительно оси V (рис. 24.1). 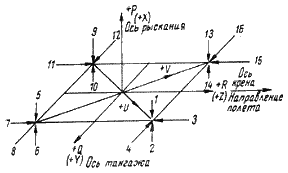 Рис. 24.1. Расположение относительно осей координат ЖРД реактивной системы управления лунного корабля: ЖРД 2, 4, 5, 8, 10, 11, 13, 15 топливная система А; ЖРД 1, 3, 6, 7, 9, 12, 14, 16 топливная система В; Р, Q, R – связанная система координат; X, Y, Z – ннерциальная система координат Конструктивные особенности и ограничения Стремление сделать конструкцию корабля Apollo легкой привело к тому, что узел стыковки командного отсека с лунным кораблем оказался не очень жестким, вследствие этого возникают изгибные колебания Apollo. Те же требования легкости конструкции заставили отказаться от перегородок в баках для гашения плескания топлива, что привело к появлению вынужденных колебании Apollo и несбалансированных моментов при работе ЖРД взлетной ступени. Из-за затемнения иллюминаторов частицами выхлопных газов наложены ограничения на включение ЖРД РСУ. Для безопасности экипажа и предотвращения резких забросов сервопривода ЖРД посадочной ступени специальным механизмом ограничивается скорость сервопривода до 0,2 град/сек. Расположение ЖРД РСУ под углом 45° к осям связанной системы координат приводит к взаимному влиянию управления с помощью ЖРД РСУ (оси U, V) и управления отклонением ЖРД посадочной ступени (оси Q, R). Режим работы цифрового автопилота лунного корабля Режимы работы ЦАП лунного корабля определяются необходимостью обеспечить все этапы полета лунного корабля no программе полета Apollo с посадкой на Луне. Режимы полета включают: маневры ориентации относительно центра масс на произвольные углы, стабилизацию заданной ориентации, поступательные перемещения с помощью ЖРД РСУ, маневрирования на активных участках траектории полета посадочной и взлетной ступеней лунного корабля. Ниже приводится перечень режимов работы ЦАП лунного корабля. 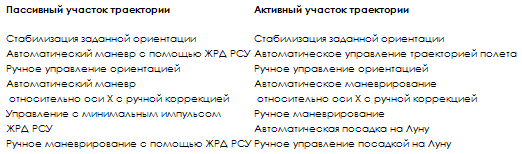 Описание цифрового автопилота лунного корабля Необходимая информация для решения задач управления ЦАП поступает с гиростабилизированной платформы блока инерциальных измерений. Информация об угловой ориентации аппарата снимается непосредственно с рамок и подается в блок преобразования данных. Информация о поступательных перемещениях снимается с импульсных интегрирующих маятниковых акселерометров, расположенных на гиростабилизированной платформе. Специальные датчики угловой скорости не применяются. Оценка угловой скорости (с последующей фильтрацией) и возмущающего ускорения производится ЦАП лунного корабля. ЦАП лунного корабля состоит из трех подсистем: расчета ориентации, законов управления ЖРД РСУ и законов управления вектором тяги ЖРД посадочной ступени. Законы управления ЖРД РСУ разделены на 3 отдельных канала, Р, U, V. Законы управления отклонением вектора тяги ЖРД посадочной ступени разделяются на 2 канала Q и R. Расчет точной настройки отклонения вектора тяги для каждого канала основывается на независимом законе управления в одной плоскости. Основной период квантования автопилота 0,1 сек, но обычно для выполнения расчетов ЦАП требуется 0,025 сек. В дополнение к основной программе ЦАП имеется спецпрограмма, которая на активном участке траектории полета выполняется каждые 2 сек, приводит в соответствие цепи автопилота, зависящие от уменьшения массы аппарата, и рассчитывает смещение углового ускорения от действия тяги главного ЖРД. На рис. 24.2 изображена блок-схема управления стабилизацией аппарата на пассивных участках траектории полета. Основными элементами системы являются блок оценки угловых переменных, блоков законов управления ЖРД РСУ, блок логики выбора ЖРД РСУ. В алгоритме оценки угловых переменных в качестве основных измеряемых величин используются углы отклонения инерциальной стабилизированной платформы. На пассивном участке траектории полета в алгоритме оценки вырабатываются как угол, так и угловая скорость. При этом применяется нелинейная пороговая логика для подавления шумов измерения низкого уровня. Информация об угловом ускорении при включении ЖРД РСУ также вводится в алгоритм оценки. Управляющие импульсы формируются с помощью законов управления на основе информации об ошибке ориентации, эффективности управления и логических функций на фазовой плоскости. В блоке логики выбора ЖРД РСУ, осуществляется выбор включения ЖРД, в которых сочетается создание требуемых моментов с необходимым направлением поступательного перемещения. Кроме того, в системе имеется временная логика включения ЖРД РСУ для определения условий управления относительно осей U, V двумя ЖРД РСУ, а относительно оси Р четырьмя ЖРД. 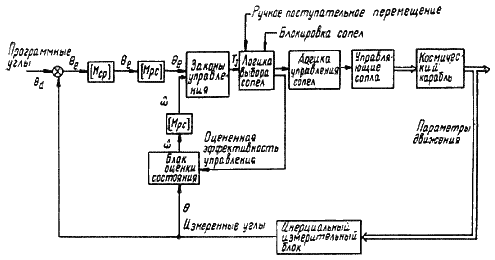 Рис. 24.2. Блок-схема управления стабилизацией. На рис. 24.3 изображена блок-схема автоматического управления ориентацией аппарата на пассивных участках траектории полета. Автоматическое управление ориентацией осуществляется при помощи тех же логических операций, что и стабилизация ориентации, но с добавлением программы изменения ориентации. Эта программа вычисляет требуемые управляющие команды по углу и угловой скорости и ряд углов запаздывания ?. Углы запаздывания вводятся для предотвращения перерегулирования в начале и в конце маневра. Упрощенные уравнения программы маневра изменения ориентации имеют вид: 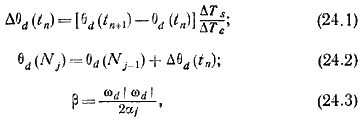 где уравнение (24.1) решается с периодом цикла управления траекторией полета (?Тc=Nj—Nj-1=2 сек), а уравнение (24.2)—с периодом цикла управления ориентацией (T=0,1 сек). Величина ?d задается угловой скоростью маневра, а величина ?j определяется как предполагаемое угловое ускорение от двух ЖРД РСУ. По окончании маневра величины ?d, ??d и ? обнуляются и система возвращается к режиму стабилизации вновь заданной ориентации. 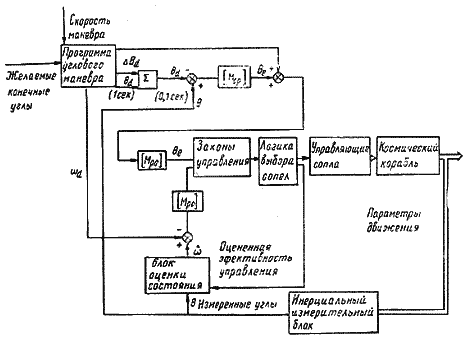 Рис. 24.3. Блок-схема автоматического управления ориентацией лунного корабля на пассивных участках траектории полета. Автоматическое управление аппаратом на активных участках траектории полета значительно сложнее, чем на пассивных. На активных участках к программе ЦАП управления ориентацией добавляются программа управления траекторией полета, программа вычисления массы корабля, в алгоритме оценки определяется угловое ускорение а; законы управления ЖРД РСУ видоизменяются таким образом, чтобы по оцененному значению углового ускорения ввести поправку в текущее значение эффективности управления; на участках снижения и посадки на Луну осуществляется управление величиной и направлением вектора тяги посадочного ЖРД, с учетом взаимодействия с ЖРД РСУ. Масса корабля и тяга ЖРД рассчитываются ЦАП каждые 2 сек по уравнениям  Эти расчеты вводятся в цепь настройки ЦАП. Эффективность управления ЖРД РСУ относительно осей Р, Q, R рассчитывается по уравнению  где аj – угловое ускорение корабля; С1, С2, С3 – константы пропорциональные оставшейся массе. Выбор констант С1, С2, С3 осуществляется для каждой оси и каждой конфигурации аппарата – посадочной и взлетной. Таким образом подсчитанные величины ортогональных компонентов угловых ускорений ?qu и ?ru затем пересчитываются относительно оси V' для определения ?u'u. Вследствие инерциальной симметрии значения ?u'u можно использовать и для расчетов относительно оси V. Эффективность сигнала управления вектором тяги посадочного ЖРД рассчитывается по уравнению  где ?q, ?r– изменение углового ускорения вследствие поворота тяги относительно осей Q и R; F– рассчитываются по уравнению (24.5); Iq и Ir – величины, обратно пропорциональные ?qu и ?ru; L – определяется по уравнению  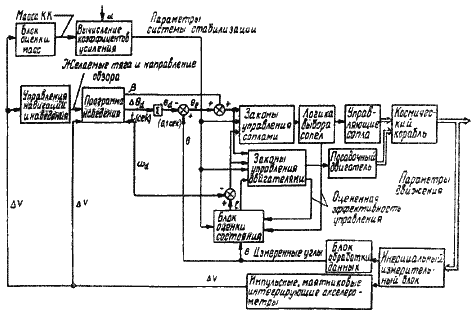 Рис. 24.4. Блок-схема автоматического управления лунным кораблем на активных участках полета при посадке на Луну На рис. 24.4 изображена блок-схема автоматического управления аппаратом на активных участках траектории полета при посадке на Луну. Алгоритм расчета ориентации Структура алгоритма расчета ориентации была выбрана на основе калмановской теории фильтрации. Принцип работы алгоритма состоит в сравнении экстраполированных и измеренных значений угла. Для расчета ориентации аппарата необходимыми ЦАП исходными измерениями являются углы кардана инерциальной стабилизированной платформы, которые выдаются каждые 0,1 сек. Чтобы выделить любые смещения углового ускорения, являющиеся следствием тяги посадочного ЖРД от углового ускорения, создаваемого ЖРД РСУ, в блок расчета ориентации необходимо ввести дополнительную информацию. Вводя информацию о работе ЖРД РСУ и информацию об управлении вектором тяги посадочного ЖРД, можно осуществить фильтрацию основных сигналов управления ориентацией, не прибегая к сложным цепям расчета угловой скорости и смещения углового ускорения. Изменения угловых скоростей аппарата от действия ЖРД РСУ на интервале последнего управления рассчитываются по формулам 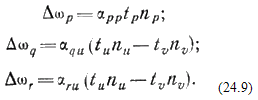 Смещение углового ускорения, происходящее вследствие команд на отклонение вектора тяги на интервале последнего управления, подсчитывается по уравнению  где T=0,1 сек период квантования; uq, ur – (+ 1,0—1) командные сигналы на поворот вектора тяги относительно осей Q и R. Углы кардана инерциальной стабилизированной платформы, полученные в процессе предыдущего выполнения расчетов, хранятся в блоке памяти бортовой ЭЦВМ. Измерив углы кардана в данный момент, можно рассчитать изменение углов и перевести в изменение углов аппарата. Разность между измеренным изменением ориентации и предсказанным изменением называется «необъяснимым» изменением ориентации. «Необъяснимое» изменение вычисляется и прибавляется к суммарному предыдущему «необъяснимому» изменению, образуя «необъяснимое» изменение ориентации в данный момент  где ?p, ?q, ?r – компоненты «необъяснимого» изменения ориентации по осям Р, Q, R. Выражения в скобках в правой части уравнений (24.11) можно определить как компоненты предсказанного изменения ориентации. Заметим, что предсказанное изменение ориентации исключается вследствие команд на привод кардана ЖРД и точное выражение для изменения ориентации в результате работы ЖРД РСУ аппроксимируется более простым выражением. «Необъяснимое» изменение ориентации используется для уточнения расчетов угловой скорости и углового ускорения аппарата. Но вначале логика используется, чтобы исключить измеренный квантованный шум. Вследствие того, что вероятное распределение этого шума не гауссовское, а прямоугольное, в каждой из осей (Р, Q, R) блока расчета ориентации шум может быть исключен нелинейным логическим фильтром. Для каждой из осей Р, Q, R, если компонент «необъяснимого» изменения ориентации меньше, чем пороговая величина ?max=0,14 град, в этом случае коррекции смещения? ?? и ?? для расчетов угловой скорости и углового ускорения считаются нулевыми. «Необъяснимое» изменение ориентации не обнуляется и когда «необъяснимое» изменение ориентации превышает пороговую величину, вводится коррекция. Нулевые коррекции ?? и ?? рассчитываются по уравнениям  После введения коррекции «необъяснимое» изменение ориентации для этой оси вновь устанавливается равным нулю. Расчет угловой скорости и смещения углового ускорения теперь производятся по уравнениям  Заметим, что смещение углового ускорения вокруг оси Р принимается равным нулю и на последнем интервале управления не учитывается изменение угловой скорости вследствие отклонения кардана ЖРД. На пассивных участках траектории полета аппарата считается, что компоненты смещения углового ускорения по осям Q и R равны нулю. Динамические характеристики блока расчета ориентации сильно зависят от выбора коэффициентов усиления цепей фильтра К? и К?. Выбор этих коэффициентов основывается на компромиссе между быстротой расчета и исключением колебаний из-за плескания топлива. Учитываемые алгоритмом расчета ориентации динамические эффекты: плескание топлива, изгибные колебания, силовое взаимодействие выхлопных струй ЖРД РСУ с конструкцией корабля, запаздывание тяги ЖРД РСУ по отношению к командам, эксцентриситет тяги ЖРД РСУ, ускорение выхлопных струй ЖРД РСУ при перемещениях по У и Z, не обнаруженные неисправности ЖРД РСУ, запаздывание сервомотора кардана ЖРД, разброс моментов инерции, упругие деформации сервопривода, точность модели измерения количества топлива в баках. Законы управления ЖРД реактивной системы управления Быстрейшая скорость повторения расчетов для ЦАП, возможная в пределах расчетной нагрузки бортовой ЭЦВМ лунного корабля, составляет 10 цикл/сек. Однако для легкой взлетной ступени 2 ЖРД РСУ могут создать угловое ускорение 50 град/сек?. Простейшим законом управления мог бы быть циклический закон, ЖРД РСУ включено – выключено. Но в этом случае точность управления угловой скоростью взлетной ступени была бы только 5 град/сек. Для осуществления управления с необходимой точностью с помощью фактора эффективности управления точно определяется продолжительность включения ЖРД РСУ, потребная для необходимого изменения угловой скорости. Порядок расчета времени работы ЖРД РСУ для случая автоматического управления одним лунным кораблем, запрограммирован для одной оси как функция: 1) ошибки ориентации ?е и ошибки угловой скорости ?е 2) параметров, рассчитываемых в цепи настройки, которые определяют кривизну и положение парабол фазовой плоскости; 3) оценки выгоды получения с одного или двух ЖРД требуемого импульса момента. Обращаясь к этой программе и вводя на входе соответствующую информацию, определяют время работы ЖРД РСУ для каждой из осей. 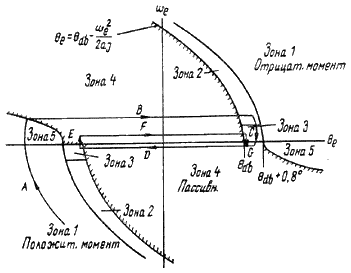 Рис. 24.5. Закон управления ЖРД реактивной системы лунного корабля на пассивных участках траектории полета Логика управления в пассивном полете иллюстрируется диаграммой в фазовой плоскости рис. 24.5. Фазовая плоскость выше оси ?е делится на 5 зон, ограниченных параболами. В логике управления в фазовой плоскости ?е – ?е используется также угловое ускорение, складывающееся из углового ускорения от ЖРД РСУ и возмущающего углового ускорения. Крутизна парабол, ограничивающих зону 2 на фазовой плоскости, соответствует условию, когда на траектории работают ЖРД РСУ. Значения ускорений от ЖРД РСУ, которые определяют эту параболу, подсчитываются в контуре настройки. Парабола, разделяющая зоны 4 и 5, не траекторная. Это пологая кривая, поддерживающая управление с малой угловой скоростью, однако не настолько, чтобы существовали большие ?е. Форма кривой сохранена параболической, чтобы логика границ была общей и удобной для компактности кодирования. Выбранная пологость соответствует угловому ускорению 1,4 град/сек?. Пересечение парабол с осью ?е является функцией зоны нечувствительности ?db, выбираемой астронавтом или программой, выполняющей автоматический маневр. Допустимые ошибки ориентации области зоны нечувствительности могут быть 0,3, 1 и 5°. Фазовая плоскость сконструирована таким образом, что управляющее действие из любых начальных условии с помощью двух главных импульсов приводит к заданной ориентации. На рис. 24.8 это показано сегментом AВС. После перехода в зону нечувствительности состояние аппарата определяется минимальным предельным импульсным циклом DEFG с единичным зажиганием одного ЖРД РСУ каждый раз при пересечении зоны 3. 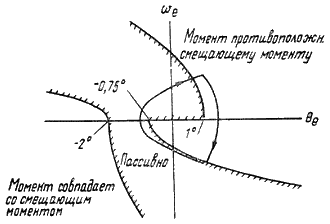 Рис. 24.6. Закон управления ЖРД реактивной системы лунного корабля на активных участках траектории полета На активных участках траектории полета используется логика управления, показанная на рис. 24.6. Точки пересечения парабол с осью ?e передвигаются в. зависимости от величины расчетного смещающего углового ускорения. Точки пересечения (1°, -2°, 0,75°), показанные на рисунке, типичны для активного участка взлета, когда вектор тяги ЖРД взлетной ступени смещен. Крутизна четырех парабол устанавливается по четырем разностям угловых ускорений. Верхняя левая парабола определяется минимальным ускорением ?min=1,4 град/сек?, как и в случае пассивного полета. Верхняя правая парабола определяется располагаемой разностью ускорений между ускорением от смещающего момента и противоположным по знаку ускорением от ЖРД РСУ. Нижняя правая парабола определяется только смещающим угловым ускорением (ЖРД РСУ не работают). Фазовая плоскость спроектирована так, что аппарат управляется низкочастотным предельным циклом, в котором один раз за цикл дается команда на зажигание ЖРД РСУ и отрабатывается единичный управляющий импульс, противоположный по знаку смещающему моменту. Хотя ЦАП должен выполнять одни и те же функции управления аппаратом, когда лунный корабль состыкован с основным блоком и если он летит один, однако для состыкованной компоновки режим ЦАП разрабатывался отдельно. Особенность проблемы заключалась в том, что в состыкованном виде корабль Apollo имеет 3 формы низкочастотных изгибных колебаний и слабый по прочности переходник, стыкующий основной блок и лунный корабль. Поэтому была разработана специальная логика торможения, исключающая, возможность зажигания ЖРД РСУ с частотой собственных изгибных колебаний корабля Apollo. Кроме законов автоматического управления ориентацией аппарата с помощью ЖРД РСУ были разработаны специальные законы, обеспечивающие ручное управление. По законам ручного управления в зависимости от отклонения рукояток управления ориентацией вырабатываются сигналы на вход. в ЦАП. При доводке характеристик ЦАП с использованием ортогональных осей координат Р, U, V применительно к законам управления ЖРД РСУ в фазовой плоскости относительно каждой отдельной оси было обнаружено перекрестное влияние каналов управления. Распределение массы лунного корабля таково, что главные оси моментов инерции проходят вблизи осей Q и R, а не U и V. В результате, момент от ЖРД оси V порождает угловое ускорение не только относительно оси V, но и относительно оси U. Величина одновременно возникающего перекрестного ускорения такова, что в худшем случае вектор углового ускорения отклоняется на 15° от действующего вектора момента. Чтобы устранить перекрестное влияние каналов управления ЖРД РСУ, была введена неортогональная система осей координат U' и V' (рис. 24.7). Направление осей U' и V' определялось единственным требованием, чтобы направление U' было ортогонально угловому ускорению, возникающему от вектора момента оси V или вектора момента оси Р, направление V было ортогонально угловому ускорению, возникающему от вектора момента оси U или момента оси Р. Управления, определяющие угол ? имеют вид  Находя вектор ошибки ориентации и вектор ошибки угловой скорости на осях U' и V' и используя компоненты U' и V' для определения требуемых векторов моментов ЖРД РСУ по осям U и V, исключается перекрестное влияние каналов управления. 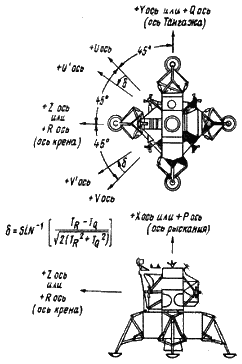 Рис. 24.7. Система неортогональных осей координат лунного корабля Закон управления направлением вектора тяги При проектировании управления карданом ЖРД для изменения направления вектора тяги посадочной ступени лунного корабля предусматривалось использование этого управления для совмещения вектора тяги с центром масс аппарата и уменьшения таким образом расхода топлива на ЖРД РСУ. Так как управление ориентацией должно обеспечиваться ЖРД РСУ, при проектировании не требовалось задавать большую угловую скорость изменения направления вектора тяги, и был выбран маломощный и легкий привод кардана, обеспечивающий изменение угла отклонения ЖРД со скоростью 0,2 град/сек. Привод связан с ЦАП простым принципом включено-выключено. Для обеих осей Q и R, вокруг которых можно поворачивать вектор тяги, ЦАП может давать команды на угловую скорость 0,2 град/сек; -0,2 град/сек или ноль. Однако минимизация расхода топлива на ЖРД РСУ была основной проблемой, и так как в процессе торможения и посадки ЖРД посадочной ступени работает все время, искали закон управления ориентацией с использованием посадочного ЖРД и без включения ЖРД РСУ по каналам U и V. Выбранному закону соответствует минимальное время управления. Дифференциальное уравнение, связывающее сигнал, управляющий карданом ЖРД, с отклонением лунного корабля от требуемой ориентации относительно осей Q и R, имеет вид 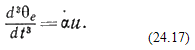 Первая и вторая производные от ошибки ориентации по времени есть ошибка угловой скорости и ошибка углового ускорения. Предполагая, что все переменные состояния, используемые законом управления, измеряются без шума и без ошибок, оптимальное управление можно определить как функцию состояния системы в данный момент следующим образом 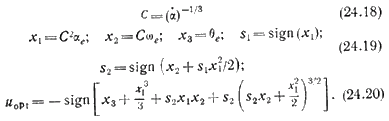 Параметр С имеет размерность – время и обращает переменные состояния (?e, ?e, ?e) в безразмерные переменные (x1, X2, X3). Оптимальный управляющий сигнал uoptдается в безразмерных величинах состояния системы. Работа цифрового автопилота при первой посадке на Луну В процессе первой посадки на Луну ЦАП в начале управлял лунным кораблем в автоматическом режиме и в конце по командам от ручки управления ориентацией; при этом ориентация вектора тяги ЖРД и лунного корабля изменилась от горизонтальной в начале торможения до вертикальной при посадке. Первые 4 мин активного участка торможения после начального неустановившегося режима закон управления ориентацией вектора тяги работал успешно, медленно изменяя ориентацию без помощи ЖРД РСУ по каналам U и V. Затем из-за плескания топлива в баках возникли колебания большой амплитуды, выходящей за пределы зоны нечувствительности закона управления ЖРД РСУ. ЦАП вырабатывал команды управления ЖРД РСУ, ограничивавшие амплитуду колебаний лунного корабля. Колебания угловой скорости тангажа с частотой 0,5 гц из-за плескания топлива видны на рис. 24.8. 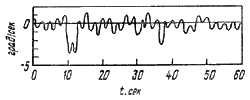 Рис. 24.8. Угловая скорость тангажа на активном участке траектории посадки лунного корабля Apollo-11 Автоматическое управление вело лунный корабль на посадку в кратер размерами с футбольное поле с большим количеством огромных камней. Н. Армстронг переключил ЦАП на ручное управление, изменил курс корабля, перелетел кратер, выбрал ровное место, и посадил корабль с помощью ручного управления. После взлета с Луны управление с помощью ЦАП тангажом взлетной ступени показано на рис. 24.9. После старта и вертикального подъема в течение 10 сек была подана команда на автоматическое управление тантажом со скоростью 10 град/сек и выход на угол тангажа 52°. После окончания маневра по тангажу наблюдался типичный низкочастотный предельный цикл изменения ориентации. Когда было израсходовано все топливо взлетной ступени, ее центр масс переместился из заднего в переднее положение. При взлете центр масс был сзади вектора тяги, после выгорания топлива он переместился в положение впереди вектора тяги. Это явилось причиной изменения компонентов смещения углового ускорения вдоль обеих осей U' и V'. Компонент V' смещения углового ускорения, подсчитанный за последние 150 сек активного участка взлета, показан на рис. 24.10. ЦАП настраивал свои параметры в пределах закона управления ЖРД РСУ и в соответствии с изменяющимся ускорением смещения.  Рис. 24.9 Команды управления по тангажу и фактическое изменение тангажа при взлете с Луны Apollo-11. 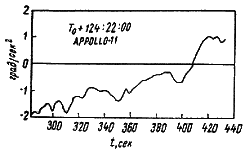 Рис. 24.10. Подсчитанный компонент V' углового ускорения в конце активного участка траектории взлета с Луны Apollo-11. 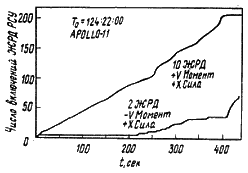 Рис. 24.11. Число включений ЖРД оси V реактивной системы управления на активном участке траектории взлета Apollo-11 Общее число зажиганий ЖРД РСУ оси V в течение всего активного участка взлета показано на рис. 24. 11. После взлета во время маневра по тангажу управление ориентацией вокруг оси V поддерживалось около 200 сек зажиганием только +V ЖРД. Позднее амплитуда предельного цикла увеличилась и для поддержания ориентации стали включаться +V ЖРД и -V ЖРД. Хотя -V момент создает угловое ускорение в том же направлении, в котором действует ускорение смещения от ЖРД взлетной ступени, однако +V момент и -V момент создаются ЖРД РСУ, дающими тягу вверх (+Х) и поэтому не происходит потери AV. Возникновение моментов +V и -V объясняется колебанием взлетной ступени вследствие плескания топлива в баках. Перед концом активного участка взлета после перемены знака смещения углового ускорения не подавалось команд на зажигание +V ЖРД и управление ориентацией поддерживалось вокруг оси V только включением -V ЖРД. [19.] 2.5. Бесплатформенная аварийная система управления лунного корабля Наряду с основной системой управления и навигации, в которой используется гиростабилизированная платформа, лунный корабль имеет бесплатформенную аварийную систему управления и навигации. Основное назначение аварийной системы управления состоят в обеспечении встречи и стыковки лунного корабля с командным отсеком в любой момент их раздельного полета, если отказала основная система управления и навигации. Аварийная система может осуществлять управление кораблем Apollo на любом участке траектории полета Земля-Луна-Земля и это было доказано в полете Apollo-13. Описание бесплатформенной аварийной системы управления Аварийная система управления разработана фирмой TRW (США). Функциональная блок-схема системы представлена на рис. 25.1. Блок чувствительных элементов аварийной системы состоит из трех маятниковых акселерометров, трех гироскопов и электронного оборудования. Оси чувствительных элементов образуют ортогональный трехгранник и параллельны осям тангажа, рыскания и крена. Чувствительные элементы выдают информацию при помощи импульсных датчиков моментов со следующими характеристиками. 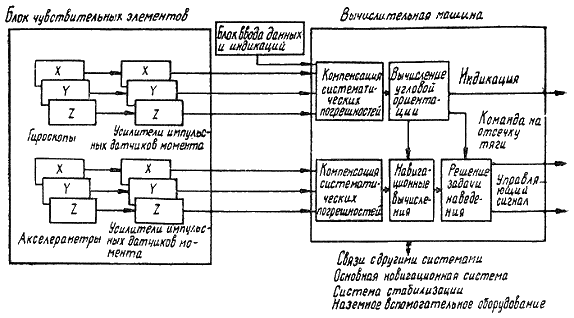 Рис. 25.1. Блок-схема бесплатформенной аварийной системы управления лунным кораблем 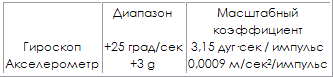 Чувствительные элементы монтируются на прецизионной-установочной раме, привязка которой к корпусу корабля осуществляется с помощью прецизионных поверхностей. Никаких приспособлений для изоляции вибраций не применяется. Бортовая ЭЦВМ аварийной системы управления универсального типа имеет запоминающее устройство на 4096 слов и решает задачи управления и навигации. Опорная система координации задается матрицей направляющих косинусов, характеризующей ориентацию приборных осей и осей инерциальной системы координат. Коррекция направляющих косинусов по измерениям гироскопов производится каждые 20 сек. Измеренные по связанным осям составляющие приращения скорости преобразуются в инерциальную систему координат каждые 40 мсек. Программа полета предусматривает автономную первоначальную выставку и калибровку приборов. Работа бесплатформенной аварийной системы управления Двумя участками, на которых работа аварийной системы управления в максимальной степени подвержена влиянию динамики полета лунного корабля, являются участки спуска и подъема (обычно разделенные отрезком времени, в течение которого лунный корабль находится на поверхности Луны). На каждом участке – при посадке на Луну и взлете с Луны – производится изменение скорости на 1830 м/сек в течение 10 мин, сопровождающееся маневрами разворота, предельными циклами и вибрацией. Перед началом спуска с орбиты ИСЛ осуществляется начальная выставка координат аварийной системы управления по данным основной системы управления и навигации, определяется начальное значение навигационного вектора состояния и производится компенсация смещений гироскопов и акселерометров. Смещение нулей гироскопов определяется путем сравнения с данными ориентации, вырабатываемыми основной системой управления и навигации; нули акселерометров определяются по сигналам, снимаемым с чувствительных элементов аварийной системы на пассивном участке траектории. На поверхности Луны вторично производятся выставка и определение смещения нулей чувствительных элементов. После отделения лунного корабля от командного отсека аварийная система работает в режиме дублирования основной системы управления и навигации, осуществляющей спуск корабля. В фазе торможения при заходе на посадку с работающим ЖРД, если возникнет аварийная ситуация и переход на аварийную систему управления, система должна вывести лунный корабль на безопасную орбиту и обеспечить встречу и стыковку с командным отсеком. В условиях нормального снижения и посадки аварийная система используется для подтверждения правильности работы основной системы управления и навигадии. В случае отказа основной системы управления после перехода на ручное управление посадкой лунного корабля аварийная система должна выдавать информацию об ориентации корабля. Сразу же после посадки на поверхность Луны аварийная система переводится на режим расчета навигационных задач старта с Луны и встречи с командным отсеком. При нормальных условиях взлета с Луны аварийная система дублирует основную систему управления и навигации. [23.] Оценка точности аварийной системы управления Для оценки точности аварийной системы управления сравнивались значения параметров траектории полета корабля, определенных наземной сетью связи и слежения, основной системой управления и навигации и аварийной системой. Полученные результаты при обработке трех траекторий полетов Apollo-10, Apollo-11 и Apollo-12 хорошо согласуются между собой. Погрешность в определении аварийной системой скорости при спуске на Луну не превышает 1,2 м/сек при значении измеряемой величины до 1800 м/сек. Литература 1. Hardy G. Н. Man's role in launch vechicle guidance and control. AIAA Paper № 69—876. ЭИ АиР, 1970, № 17; РЖ, 1970, 5.41.182 2. Kurkowski R. L., and Hardy G. Н., Gordon Н., Saturn V manual backup guidance and control piloted simulation study. NASA TN D-4481, 1968 3. Lemon R. S., and Stern A. D. Spacecraft backup guidance and control for the Saturn V launch vechicle. The Boeing Co., Doc. No D2—118176—1. Jan. 13, 1969 4. Ваlsam R. E., Anzel В. М. A simplified approach for correction of perturbations on a stationary oirbit. AIAA Paper № 68—456, (ЭИ АиР, 1969, № 7); РЖ, 1968, 12.41.47 5. Gilchrist J. D., Sоland D. E. A manual optimal guidance scheme using a predictive model. J. Spacecraft and Rockets, 1968, 5, № 10, ЭИ АиР, 1969, № 7; РЖ, 1969, 5.41.206 6. Anderson P. A., and Gilchrist J. D., Manual optimal guidance techniques. National Space Meeting of the Institute of Navigation, Feb. 20, 1968, Cocoa Beach, Fla. РЖ, 1969, 6.41.217 7. Edelbaum T. N. Minimum impulse guidance. AIAA Paper № 69—74, ЭИ АиР, 1969, № 33; РЖ, 1969, 10.41.107 8. Evans F. A., Wilcox J. C. Experimental strapdown redundant sensor inertial navigation system. AIAA Paper № 69—851, ЭИ АиР, 1970, № 13; РЖ, 1970, 5.41.224 9. Webber R. F. Performance of the lunar module, powered flight, tracking data processor during the Apollo 12 mission. AIAA Paper № 70—1020, ЭИ АиР, 1971, № 8; РЖ, 1971, 2.41.272 10. Роwers W. F., Mc Dannell J. P. Switching conditions and a synthesis technique for the singular Saturn guidance problem. AIAA Paper № 70—965, ЭИ АиР, 1971, № 15; РЖ, 1971, 3.41.59 11. Luh J. Y. S., Maguiraga M. Minimum trajectory sensitivity of a large launch booster control system. IEEE Trans. Aerospace and Electron. System., 1969, 5, № 2, ЭИ AиР, 1969, № 39; РЖ, 1969, 11.41.200 12. Horn Н. J., Chandler D. C., Buckelew V. L. Iterative guidance applied to generalized missions. J. Spacecraft and Rockets, 1969, 6, № 1, ЭИ АнР, 1969, № 39: РЖ, 1969, 10.41.264 13. Мartin F. Н., Battin R. H. Computer—controlled steering of the Apollo' spacecraft. J. Spacecraft and Rockets, 1968, 5, № 4, (ЭН АиР, 1968, № 30); РЖ, 1968, 10.41.252 14. Mc Ruer D. Т., Weir D. Н., Klein R. Н. A pilot-vehicle systems approach to longitudinal flight director design. AIAA Paper № 70—1001, (ЭИ АиР, 1971, № 13) 15. Сhen P. P. Real—time Kalman filtering of Apollo LM/AGS rendezvous radar data. AIAA Paper, № 70—957, ЭИ АиР, 1971, № 10; РЖ 1971, 2.41.273 16. Satin A. L., Рixley P. T. Statistics of state—vector corrections for Apollo onboard computers. AIAA Paper, № 70—162, ЭИ АиР 1970 № 33; РЖ, 1970, 10.41.255 17. Bielkowicz P., Horrigan R. C., Walsh R. C., Manual onboard methods of orbit determination. AIAA Paper, № 70—159, (ЭИ АиР, 1970, № 33) 18. Salinger S. N., Brandstaller J. J. Application of recursive estimation and Kalman filtering to Doppler tracking. IEEE Trans. Aerospасе and Electron. Syst, 1970, 6, № 4, ЭИ АиР, 1970. № 45; РЖ, 1970, 12.41.220 19. Cox K. J. Apollo reaction control systems. IEEE Transection automatic control,IEEE №9C41-AC, Aug.4, 1969 20. Stubbs G.S., Penchuk A., Schlundt R.W Digital autopilot for thrust vector control of the Apollo CSM and CSM/LM vehicles. AIAA Paper № 69—847 21. Miller J. E., Laats Ain. Apollo guidance and control system flight experience. AIAA Paper № 69—891 22. Stengel R. F. Manual attitude control of the Lunar Module. AIAA Paper № 69—892 23. Mason W. L., Wedekind D. E. Prediction and measurement of strap-down inertial measurement unit performence on lunar missions. AIAA Paper № 70—1028 |
|
||
|
Главная | Контакты | Нашёл ошибку | Прислать материал | Добавить в избранное |
||||
|
|
||||