|
||||
|
|
Инженерные переправочно- десантные средства СССР и России  К переправочно-десантным средствам относят военно-технические объекты, с помощью которых возможны форсирование и переправа через различные участки водных преград (реки, озера, водохранилища, узкие проливы и др.) личного состава и вооружения подразделений и частей различных видов вооруженных сил. Переправочно-десантные средства в настоящее время включают самоходные средства (плавающие транспортеры для десантной переправы личного состава, вооружения и техники батальонов первого эшелона, самоходные паромы для переправы танков, приданных батальонам первого эшелона) и десантные лодки. Преодоление войсками водных преград в ходе ведения боевых действий до сих пор является одной из сложнейших задач инженерного обеспечения. Поскольку термины «преодоление» водных преград, «переправа» через водную преграду и «форсирование» водной преграды даже в специальной литературе часто применяются не точно, целесообразно с самого начала определиться с используемой ниже терминологией. В соответствии с Боевым Уставом «форсирование» – это преодоление войсками с боем водной преграды, противоположный берег которой обороняется противником; «переправа» – процесс преодоления водной преграды войсками без ведения боя. Форсирование водной преграды заканчивается с захватом передовым отрядом или первым эшелоном наступающих войск плацдарма, исключающего возможность ведения противником огня прямой наводкой по форсирующим войскам. После захвата плацдарма начинается «переправа» через водную преграду всех остальных элементов боевого порядка войск. Оба термина «форсирование» и «переправа» могут быть при необходимости для краткости заменены одним термином – «преодоление» водной преграды. Общий порядок преодоления войсками водной преграды, как правило, является следующим: – форсирование водной преграды передовыми подразделениями с задачей захвата прибрежной полосы противоположного берега, разграждения ее, устройство выходов из воды, т.е. обеспечение высадки и перехода в атаку мотострелковых батальонов первого эшелона; – форсирование мотострелковыми батальонами со средствами усиления с задачей расширения захваченной полосы и образование плацдарма на противоположном берегу; – десантная переправа на паромах танков, приданных батальонам первого эшелона; – переправа через водную преграду последующих эшелонов боевых порядков войск. В этом сложном и тяжелом для наступающих войск процессе форсирования водной преграды в современных условиях используются как штатные плавающие средства мотострелковых подразделений (плавающие бронированные гусеничные и колесные бронетранспортеры, боевые машины пехоты и др.), так и инженерные переправочно-десантные средства, предназначенные для доставки десанта, боевой техники, боеприпасов и других предметов снабжения и обеспечения боевой деятельности войск. 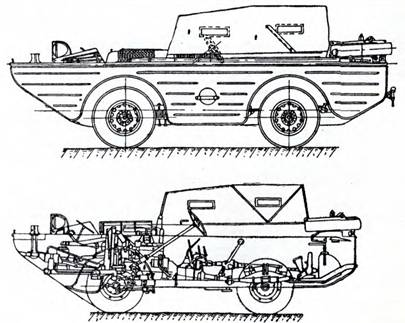 Рис. 1 Плавающий автомобиль ГАЗ-НАМИ-011  Рис.2 Плавающий автомобиль МАВ (ГАЗ-46) Переправочно-десантные средства армии нашей страны создавались и совершенствовались на протяжении всего времени существования инженерных войск. Специальное переправочное имущество как табельное средство, движущееся за войсками, появилось в России в начале XVII века. Это был переправочный парк, перевозимый «при войсках наравне с артиллерийским вооружением». Он состоял из пяти лодок (стругов), обоза и команды из 20 плотников во главе с мостовым мастером. Впервые понтонный парк, материальная часть которого использовалась для десантной переправы, был введен в старой русской армии в 1701 г. Конструкция понтонов парка последовательно совершенствовалась: сначала это был деревянный каркас с жестяной обшивкой, в 1759 г. обшивка была заменена парусиной (понтон А.Немого), в 1849 г. появились деревянные понтоны, в 1872 г. железные понтоны Томиловского, в 1916 г.- самоходные (на воде) понтоны Неговского. В Первую мировую войну и Гражданскую было крайне ограниченное количество табельных средств, причем далеко несовершенных. Наибольшее применение получили поплавки Полянского вследствие их высокой транспортабельности. Однако плотики и паромы, собранные из этих поплавков, были уязвимы для пуль и осколков. В предвоенные годы (193.5-1941 гг.), несмотря на ускоренное развитие, военная промышленность не успевала выполнять заказы на военную технику, в том числе инженерную, поэтому обеспеченность переправочными средствами была крайне низкой. Боевой опыт, полученный в Отечественной войне по обеспечению преодоления рек, особенно при форсировании их с ходу, выявил настоятельную необходимость создания самоходных десантных средств различной грузоподъемности . В результате в первый послевоенный период и в дальнейшем были разработаны и поступали в войска плавающие автомобили и плавающие гусеничные транспортеры для переправы вооружения и военной техники передовых отрядов и подразделений первых эшелонов при форсировании водных преград, десантные лодки для десантной переправы мотострелковых подразделений, самоходные паромы для десантной переправы танков и тяжелой артиллерии. Развитие вооружения и техники различных родов сухопутных войск вплоть до настоящего времени требовало на каждом этапе ускоренного создания новых и модернизации существующих переправочно-десантных средств. Рассмотрим кратко основные переправочно-десантные средства в их историческом развитии. ПЛАВАЮЩИЕ АВТОМОБИЛИ И ПЛАВАЮЩИЕ ГУСЕНИЧНЫЕ ТРАНСПОРТЕРЫ В первый послевоенный период (1946-1953 гг.) велась интенсивная разработка новых переправочно-десантных средств, которых до этого в инженерных войсках нашей страны не было. Это плавающий гусеничный транспортер К-61, разработанный в 1948 г. под руководством А.Ф.Кравцева, и большой 6x6 плавающий автомобиль БАВ (ЗИЛ- 485), созданный в 1949 г. под руководством В.А.Грачева. Обе эти машины стали в те послевоенные годы основными переправочными средствами в процессе десантной переправы личного состава, вооружения и техники мотострелковых подразделений при форсировании водных преград. Почти одновременно в 1948 г.был создан малый плавающий автомобиль НАМИ- 011. Опыт его разработки использовался в 1952 г. при создании малого плавающего автомобиля для разведки МАВ (ГАЗ-46) . Плавающий автомобиль НАМИ-011 разрабатывался под руководством Б.В.Шишкина группой конструкторов и научных работников НАМИ (В.Ф.Горанов, К.С. Карпухин, П.А.Лобунский , А.Г. Архаров и др.) на базе автомобиля высокой проходимости ГАЗ-67Б. Основные технические характеристики плавающего автомобиля НАМИ- 011 (рис. 1) были следующими. Колесная формула 4x4, трансмиссия механическая, водоизмещающий корпус – металлический. Собственная масса 2000 кг при грузоподъемности на суше и на воде 500 кг. Мощность карбюраторного двигателя – 40 кВт. Максимальная скорость движения по суше – 95 км/ч, по воде – 9,1 км/ч. Водоходный движитель машины – один четырехлопастный гребной винт диаметром 465 мм с установленным за ним водяным рулем. Тяга винта на швартовах – 4,22 кН. В результате автомобиль при удельной мощности 16 кВт/т имел относительную скорость (число Фруда по водоизмещению) Frv = 0,693 и удельную тягу на швартовах 24,87 кН/м? . Водооткачивающий насос – коловратного типа с подачей 150 л/мин. Диаметр циркуляции – 12 м. Тяговое усилие кабестана, установленного в передней части корпуса, составляет 14,71 кН. Но судьба создателей этого автомобиля и его самого была необычной и печальной. За разработку этой машины перечисленные выше лица во главе с Б.В.Шишкиным получили Сталинскую премию. Видимо, это вызвало среди части сотрудников ГАЗа неприязнь, следствием которой было письмо на имя И.В.Сталина, в котором критиковались технические характеристики созданного плавающего автомобиля и давались обещания создать подобного рода автомобиль, но с существенно более высокими значениями технических параметров. Например, утверждалось, что скорость движения по воде будет не меньше чем 16 км/ч, и давались другие обещания, наряду с необоснованной критикой и рядом обвинений в адрес руководства ГАЗа и руководителей конструкторского бюро. Инициатором и автором этого пмсьма был В.А.Крещук. В результате достаточно быстрого, но в то же время необъективного рассмотрения содержания этого письма специальной комиссией в 1950 г. сотрудники НАМИ были лишены Сталинской премии с прекращением работ по плавающим автомобилям, а в конструктоском бюро ГАЗа произошли кадровые изменения, которые поставили во главе работ по плавающим автомобилям В.А. Крещука. Через некоторое время выяснилось, что обещания, которые он давал, не могут быть выполнены, поскольку являлись следствием решений некомпетентного в вопросах теории и практики плавающих машин человека. В результате последовала вторая серия кадровых перестановок на ГАЗе и подтверждение заказа на создание новых моделей плавающих автомобилей, одной из которых был ГАЗ-46.  Плавающий 4x4 автомобиль МАВ (ГАЗ-46) (рис.2) был создан на базе автомобиля высокой проходимости ГАЗ-69. При его проектировании учитывался опыт боевой эксплуатации и конструкция американского плавающего автомобиля Форд-GPA, переданного нашей армии в последние годы Второй мировой войны в количестве нескольких сотен единиц. Руководил работами по проектированию ГАЗ-46 главный конструктор А.А.Смолин. Эта небольшая колесная амфибия создавалась с использованием многих агрегатов, узлов и систем автомобиля высокой проходимости ГАЗ-69. Вместе с тем автомобиль был оснащен необходимыми для движения по воде дополнительными агрегатами и системами: водоизмещающим герметичным корпусом, гребным винтом с установленным за ним водяным рулем, водооткачивающим насосом и др. Максимальная мощность установленного на автомобиле в переднем отсеке корпуса 4-х-тактного карбюраторного двигателя составляла 40,5 кВт при 3600 об/мин, что обеспечивало при собственной массе автомобиля 2,053 т и грузе 0,5 т удельную мощность 15,86 кВт/т. Тоннель для трехлопастного гребного винта диаметром 0,525 м в нижней своей зоне имел профилированную полунасадку для улучшения тяговых характеристик винта, которая одновременно защищала гребной винт снизу при движении по суше и мелководью. Максимальная тяга на швартовах составляла 4,81 кН, что давало при отнесении ее к площади диска гребного винта 22,26 кН/м? . При этом мощность двигателя, отнесенная к площади диска гребного винта, составляла 187,5 кВт/м? . Максимальная скорость движения автомобиля по спокойной глубокой воде достигала 10,6 км/ч, что соответствовало относительной скорости (числу Фруда) 0,8. Максимальная скорость движения по шоссе составляла 95 км/ч. Управление автомобилем на воде обеспечивалось одновременным поворотом передних управляемых колес и водяного руля. Диаметр циркуляции на максимальной скорости достигал 12 м. Для удаления из корпуса попавшей в него забортной воды в средней его части устанавливался один насос ротационного типа с приводом от коробки отбора мощности. Повышению проходимости автомобиля в различных дорожных условиях и особенно при выходе из воды способствовала установка в передней части корпуса кабестана с приводом от носка коленчатого вала двигателя. Тяговое усилие кабестана при работе с блоком было не менее 20 кН. Большой плавающий автомобиль ЗИЛ-485 (рис.З) разрабатывался вначале в г. Днепропетровске, а затем в Москве на автомобильном заводе имени И.Лихачева. Автомобиль создавался в основном на базе автомобиля высокой проходимости ЗИС-151 с сохранением основных его агрегатов и систем, но с введением металлического водоизмещающего корпуса, гребного винта с приводом от раздаточной коробки , водяным рулем, расположенным непосредственно за гребным винтом, водооткачивающих насосов и другого дополнительного оборудования. Экипаж плавающего автомобиля – два человека. Схема общей компоновки автомобиля приведена на рис.4, из которой следует, что размещение карбюраторного двигателя мощностью 80,96 кВт и его систем в передней части водоизмещающего корпуса потребовало образования моторного отсека и изменения воздушных потоков системы охлаждения и других менее существенных изменений. На общую компоновку БАВа оказали определенное влияние конструкция американского плавающего автомобиля GMC-353 и опыт его боевой эксплуатации нашими войсками в последние годы Второй мировой войны, в процессе которой был выявлен серьезный недостаток – трудности погрузки и разгрузки через борта. Это занимало много времени и сил и требовало использования кранов или специальных временных эстакад. Этот недостаток был устранен введением на ЗИЛ-485 заднего откидного борта и придания машине двух металлических узких сходней, по которым на грузовую платформу могли затаскиваться артиллерийские системы с помощью троса лебедки машины, установленной за кабиной управления. Лебедка имела рабочее тяговое усилие 44 кН и предельное усилие 49 кН при рабочей длине троса 60 м. Введение заднего откидного борта позволило также увеличить общую площадь грузовой платформы до 11 м2 , что является важным для самоходных переправочных десантных средств. Вместе с тем это привело к некоторому уменьшению угла выхода автомобиля из воды по условиям заливаемости корпуса через задний борт. 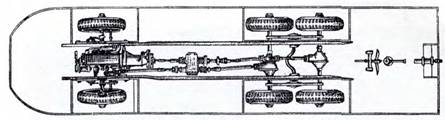 Рис. 4 Схема общей компоновки ЗИЛ-485  Рис. 5 Плавающий гусеничный транспортер К-61 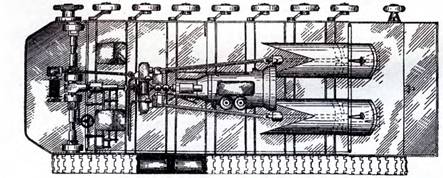 Рис. 6 Схема общей компоновки К-61 Из-за использования в конструкции узлов и агрегатов базовой машины обычных нелегированных сталей (в те годы автомобильной промышленности постановлением правительства запрещалось использование легированных сталей из-за дефицита их компонентов) собственная масса плавающего автомобиля была больше такой же массы американского плавающего автомобиля при примерно равной грузоподъемности. Собственная масса автомобиля составляла 7250 кг при грузоподъемности на суше 2500 кг и на воде – 3500 кг. Поэтому коэффициент использования массы автомобиля (отношение грузоподъемности к собственной массе автомобиля) на суше составлял 0,345, а на воде 0,423, т.е. они были небольшими и обусловленными в некоторой степени несовершенством конструкции части узлов и агрегатов автомобиля. Трехлопастный гребной винт диаметром 635 мм при максимальной частоте вращения 900-920 об/мин обеспечивал тягу на швартовах 9,17 кН.При этом удельная тяга на швартовах составляла 29,0 кН/м? , а удельная мощность, отнесенная также к площади диска гребного винта, была равна 256,2 кВт/м?. На глубокой спокойной воде автомобиль с полной нагрузкой показывал скорость 10,0 км/ч, при этом число Фруда по водоизмещению было равно 0,598. Минимальный диаметр циркуляции (поворота) при движении с максимальной скоростью и при совместном использовании передних управляемых колес автомобиля и водяного руля составлял 15,0 м. Для удаления из корпуса воды автомобиль оснащался системой водоотлива, состоящей из двух центробежных насосов (трюмного и насоса отсеков) и коллектора водоотлива. Суммарная подача (производительность) всех водоотливных средств автомобиля при максимальной частоте двигателя достигала 450 л/мин. Оба насоса работали после включения привода на гребной винт, при этом насос отсеков с максимальной подачей 150 л/мин позволял откачивать воду из левого и правого кормовых отсеков и центрального отсека при соединении их водоприемников с насосом с помощью коллектора водоотлива. Трюмный насос с подачей 300 л/мин размещался в центральном отсеке и откачивал воду только из него. На автомобиле имелся также ручной водооткачивающий насос с небольшой подачей. Максимальная скорость автомобиля на суше – 65 км/ч. Расходы топлива по шоссе на 100 км – 47 л, на воде при скорости 10 км/ч -30 л/ч. Запас хода по топливу: по суше – 450 км, на воде – 6,5 ч. При подготовке к серийному выпуску этот плавающий автомобиль в целом, а также отдельные его узлы и агрегаты были подвергнуты различным стендовым и пробеговым испытаниям. Например, осенью 1950 г. два опытных образца автомобиля совершили большой испытательный пробег через Крым на Кавказ с преодолением Керченского пролива в условиях достаточно серьезного волнения, прошли большие расстояния по воде реки Кубани. Весной 1951 г. автомобили испытывались в Карелии, где много озер, рек и сочетания различных типов грунтов. Длительным пробеговым испытаниям подвергались и серийные автомобили : осенью 1953 г. группа машин совершила пробег по маршруту Москва-Сталинград-Астрахань-Баку-Батуми-Крым- Одесса-Минск-Москва общей протяженностью более 10 тысяч километров и с большими проплывами по Волге, Кубани, Днестру и другим рекам. По результатам этих и других испытаний в конструкцию автомобилей вносились необходимые изменения с целью повышения их эффективности и надежности. В июле 1951 г. группе инженеров во главе с В.А.Грачевым за создание плавающего автомомбиля ЗИЛ-485 была присуждена Государственная премия. Плавающий автомобиль ЗИЛ-485 выпускался серийно с 1952 г. по 1963 г. и поступал на вооружение инженерных войск Советской Армии и ряда других стран. В течение этих лет некоторые узлы и агрегаты автомобиля подвергались модернизации с целью повышения их надежности и работоспособности. Всего было изготовлено около 2100 машин. Кроме эксплуатации в армии, некоторое количество этих плавающих автомобилей в то время эксплуатировалось различными отраслями народного хозяйства страны. Например, около трехсот плавающих автомобилей этого типа были переданы в Министерство рыбного хозяйства страны для использования в прудовых и озерных рыбных хозяйствах для механизации процессов выращивания и отлова рыбы, содержания рыбных водоемов и механизации других трудоемких ручных операций. Плавающий гусеничный транспортер К-61 (рис.5) был разработан в 1948 г. на базе артиллерийского тягача М-2 в ОКБ инженерных войск под руководством А.Ф.Кравцева. Промышленная разработка и изготовление производились на Крюковском вагоностроительном заводе Минтяжмаша под руководством Р.И.Медведика. Схема общей компоновки транспортера К-61 приведена на рис.6, из которой следует, что двигатель с его системами располагается в средней части водоизмещающего корпуса. Размещение тяжелого двигателя с его системами, главного фрикциона и коробки передач примерно в середине длины транспортера позволяло обеспечить приемлемые дифференты машины при движении на воде с грузом и без груза. Упрощалась также раздача мощности через раздаточную коробку на ведущие колеса гусеничного движителя, водоходные движители – гребные винты, расположенные в туннелях кормы корпуса, а также на лебедку, установленную в носовой части корпуса. Задний борт корпуса был выполнен откидным с аппарелями для погрузки и разгрузки перевозимых грузов (артиллерийских систем, автомобилей и т.д.). Максимальное тяговое усилие лебедки, которая использовалась для затаскивания на грузовую платформу несамоходных грузов и повышения проходимости транспортера в тяжелых грунтовых условиях, составляло 49 кН. Длина троса лебедки – 50 м. Габаритные размеры грузовой платформы – 5,4 х 2,6 м, что обеспечивало общую площадь грузовой платформы в 14 м2 .  Рис. 7. Плавающий транспортер ПТС-2 с плавающим прицепом Собственная снаряженная масса транспортера 9550 кг, грузоподъемность по суше – 3000 кг, на воде 5000 кг. Экипаж – два человека. Мощность двухтактного дизельного двигателя ЯМЗ-М- 204ВКр, равная 99,4 кВт, обеспечивала удельную мощность транспортера с грузом на воде 6,83 кВт/т, на суше – 7,92 кВт/т, и при этом достигалась максимальная скорость движения 36 км/ч. Движение на воде обеспечивалось двумя трехлопастными стальными гребными винтами правого вращения, расположенными в туннелях. Диаметр гребных винтов 600 мм. Винты имели шаговое отношение 0,65 и дисковое отношение 0,5 . Максимальная тяга на швартовах составляла 11,77 кН, а максимальная скорость движения на спокойной глубокой воде -10 км/ч. Относительная скорость транспортера на воде (число Фруда) составляла 0,568, удельная мощность, отнесенная к суммарной площади дисков гребных винтов, была равна 175,87 кВт/м 2 , а удельная тяга на швартовах, также приведенная к суммарной площади дисков гребных винтов, достигала 21,67 кН/м 2 . Управление транспортером на воде обеспечивалось двумя водяными рулями, размещенными непосредственно за гребными винтами и связанными механическим приводом со штурвалом, расположенным перед местом механика-водителя в кабине управления. Диаметр циркуляции транспортера на воде при повороте водяных рулей на максимально возможный угол составлял около 30 м, а при работе гребных винтов «враздрай», т.е. при работе одного винта на передний ход, а другого на задний транспортер практически поворачивался на месте без совершения поступательного движения. Для удаления забортной воды, проникшей в корпус через неплотности или повреждения, транспортер оборудован системой водоотлива, состоящей из двух лопастных водооткачивающих насосов с механическими приводами от распределительной коробки и ручного водооткачивающего насоса с малой подачей для удаления воды из корпуса при неработающем двигателе. Подача каждого лопастного насоса составляет 400 л/мин, причем водозаборник одного насоса расположен в задней части корпуса, а водозаборник другого в средней части корпуса. Расход топлива на суше был равен на 100 км пути 85… 145 л, а на воде – 25 л/ч. Запас хода по суше – 260 км, на воде – 10 часов. Во втором периоде (с 1954 г. по 80- е годы ) были разработаны плавающие гусеничные транспортеры (ПТС – в 1961 г., ПТС-М – в 1965 г., ПТС-2 – в 1973 г. и ПТС-3 – в 1988 г.) с более высокими грузоподъемностями, скоростями движения по суше и на воде, с улучшенной проходимостью при входах в воду и выходах из нее и с большими размерами грузовых платформ. У всех перечисленных транспортеров погрузка и выгрузка переправляемых грузов и техники осуществляется на суше через откинутый задний борт по специальным аппарелям. При этом самоходная техника грузится или разгружается своим ходом, а несамоходная – с помощью лебедок транспортеров, но в обоих случаях необходимо это выполнять на берегу перед входом в воду и после выхода машин из воды. Если береговые условия не позволяют транспортерам выходить на берег, разгрузка значительно усложняется и существенно увеличивается время разгрузки, так как транспортеры у берега должны разворачиваться и подходить к нему кормой для опускания аппарелей на участок берега. Но такой способ выгрузки возможен только при небольших скоростях течения, малой глубине воды и допустимого профиля берегового склона. Для повышения эффективности транспортеров некоторые из них, например ПТС-2, могут преодолевать водные преграды с буксировкой колесных плавающих прицепов грузоподъемностью до 5 т для одновременной переправы артиллерийского тягача (на транспортере) и артиллерийской системы (на прицепе) (рис.7). Но при этом скорость движения на воде уменьшается на 25… 28 %. Создание транспортеров сопровождалось разнообразными научно-исследовательскими и экспериментальными работами, проводимыми в различных научно-исследовательских организациях и на заводах. Эти работы включали поиск и отработку наиболее рациональных и эффективных технических решений по размерам и формам водоизмещающих корпусов, водоходным движителям различного типа, системам управления транспортерами на воде, водоотливным насосам и др. Много внимания уделялось повышению проходимости машин на суше и на воде, особенно во время входа их в воду и выходе из нее на берег. Гусеничный плавающий транспортер ПТС (рис.8) разрабатывался на Крюковском вагоностроительном заводе (КВЗ) под руководством главного конструктора Е.Е.Ленциуса в 1961 г. на базе агрегатов и узлов артиллерийского тягача АТС-59 и танка Т-54. Схема общей компоновки транспортера была аналогична схеме общей компоновки транспортера К-61, эксплуатация которого в течение почти 10 лет в войсковых условиях подтвердила ее целесообразность и эффективность. Дизельный двигатель мощностью 257,6 кВт размещался в средней части водоизмещающего металлического корпуса. Собственная масса снаряженного транспортера была равна 17000 кг при грузоподъемности на воде 10000 кг и 5000 кг на суше. Поэтому коэффициент использования массы транспортера достигал при движении по суше 0,294, а при движении на воде 0,588. При полной массе транспортера 27000 кг его удельная мощность на воде составляла 9,54 кВт/т, на суше с грузом 5 т – 11,71 кВт/т. Габаритная длина транспортера была равна 11,4 м, ширина – 3,3 м, а высота – 2,65 м. При этом площадь грузовой платформы достигала 18,5 м? (7,1 х 2,6м), т.е. она занимала половину всей габаритной площади транспортера. Максимальная скорость движения по суше достигала 42 км/ч. Расход топлива на 100 км пути – 150 л. Запас хода по топливу 380 км. 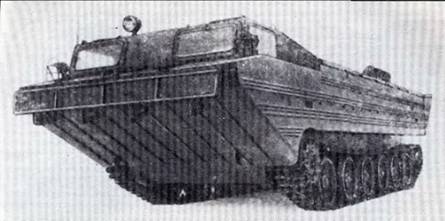 Рис. 8а. Гусеничный плавающий транспортер ПТС  Рис. 86. Гусеничный плавающий транспортер ПТС с опущенными задним бортом i аппарелями 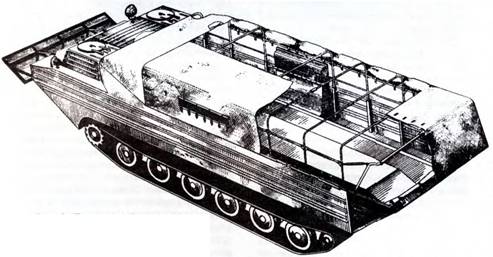 Рис. 9. Плавающий транспортер ПТС-М с комплектом морского оборудования Движение по воде обеспечивалось двумя трехлопастными гребными винтами диаметром 0,65 м в туннелях. Шаговое и дисковое отношения гребных винтов соответственно – 0,8 и 0,55. При этом мощность двигателя, приходящаяся на м? площади диска гребного винта, составляла 388,4 кВт/м? . Тяга на швартовах достигала 19,13 кН, а при отнесении ее к площади дисков винтов была равна 28,84 кН/м? . При таких значениях удельной тяги максимальная скорость транспортера на глубокой спокойной воде составляла 10,6 км/ч, что обеспечивало относительную скорость (число Фруда по водоизмещению) 0,542 . Управление транспортером на воде достигалось поворотом двух водяных рулей, расположенных непосредственно за гребными винтами, или работой гребных винтов «враздрай». При использовании водяных рулей диаметр циркуляции составлял около 90 м. Для обеспечения погрузки и выгрузки несамоходных грузов, а также для самовытаскивания при застреваниях в тяжелых дорожных условиях в передней части грузовой платформы устанавливалась лебедка с приводом от двигателя через распределительную коробку. Тяговое усилие лебедки лежало в пределах 48-49 кН. Длина троса лебедки – 70 м. Для удаления воды из корпуса в нем размещались два насоса: малый центробежный насос с подачей 400 л/мин и большой центробежный насос с двухсторонним всасыванием с подачей 4000 л/мин. При этом суммарная максимальная подача насосов достигала 4,4 м? /мин, что существенно повышало надежность транспортера на воде с позиций непотопляемости. Средние расходы топлива и запасы хода составляли: на воде с грузом 10т – 50 л/ч и запасом хода 12 часов. Постепенная модернизация транспортера ПТС привела к созданию в 1965 г. модели транспортера – ПТС- М. Эта модель также создавалась на КВЗ под руководством главного конструктора Е.Е.Ленциуса. Транспортер сохранил прежнюю схему общей компоновки, грузоподъемность, мощность двигателя, скоростные параметры по суше и на воде и проходимость. Но на нем было смонтировано дополнительное оборудование: фильтровентиляционная установка в кабине с подогревом воздуха, комплект морского оборудования (рис.9) в виде трубчатого каркаса с тентом для работы на волнении до 3 баллов, комплект санитарного оборудования на 12 носилок, новая радиостанция, прожектор, приборы ночного видения и др. Все это вместе взятое привело к увеличению собственной массы транспортера до 17800 кг и к небольшому уменьшению удельной мощности на воде до 9,26 кВт/т. Вместе с тем изменились в лучшую сторону некоторые параметры машины, в частности площадь грузовой платформы была увеличена до 20,54 м2 (7900 х 2600 мм). Подача водоотливных средств транспортера не изменилась, а другие удельные показатели изменились мало. При максимальной скорости движения по воде 10,6 км/ч число Фруда было равно 0,539. Максимальная тяга на швартовах достигала 19,2-19,5 кН, а удельная тяга на швартовах, отнесенная к площади дисков двух гребных винтов, составляла в среднем 28,84 кН/м? при удельной мощности, отнесенной также к суммарной площади дисков гребных винтов, в 388,4 кВт/м? . Управление транспортером на воде обеспечивалось поворотом водяных рулей, расположенных за гребными винтами. С помощью поворота водяных рулей обеспечивалась курсовая устойчивость и движение по криволинейным траекториям. Для поворотов с небольшими радиусами циркуляции до 20 м один их гребных винтов переключался на режим заднего хода, т.е. использовался режим работы винтов «враздрай». На рис.10 показаны фотографии циркуляционного следа, выполненные с вертолета. На рис. 10а при движении ПТС-М по криволинейной траектории за счет поворота водяных рулей, а на рис. 106 – при работе гребных винтов «враздрай».  Рис. 10а. ПТС на циркуляции с помощью водяных рулей  Рис. 106. ПТС на циркуляции при работе винтов "враздрай "   Рис. 11. Три вида на ПТС-2  Среднее давление гусениц транспортера на грунт составляло 54 кПа, а углы входа и выхода из воды не превышали 15 град. Максимальная скорость движения транспортера по суше составляла 42 км/ч, средний расход топлива при движении по грунтовым дорогам с грузом 5 т был равен 150 л на 100 км пути, а при движении по воде с грузом 10т- 50 л/ч. Плавающий гусеничный транспортер ПТС-2 (рис.11), который является дальнейшей существенно улучшенной моделью транспортеров ПТС, создавался уже в г.Луганске последовательно под руководством главных конструкторов С.П.Филонова и В.П.Колдоба в 1973 г. При сохранении схемы общей компоновки, подобной своим предшественникам, транспортер был оснащен более мощным дизельным двигателем в 522,5 кВт, а его грузоподъемность по суше и на воде была увеличена до 12 т при собственной массе 24,2 т. Удельная мощность транспортера стала равной 14,43 кВт/т, а коэффициент использования массы – 0,496. Транспортер был оборудован бронированной кабиной с фильтровентиляционной установкой, устройством для самоокапывания для отрывки защитных капониров и оснащен специальным оборудованием для эксплуатации в морских условиях. Для погрузки и выгрузки самоходных и несамоходных грузов на грузовую платформу площадью 23,6 м? (8225 х 2870 мм ) транспортер имеет задний откидной борт с двумя аппарелями и однобарабанную реверсивную лебедку с максимальным тяговым усилием в 98,1 кН и длиной троса 60 м. Лебедка может также использоваться для самовытаскивания транспортера при его застревании на труднопроходимой местности и для повышения проходимости в других тяжелых эксплуатационных условиях (снег, болота, вход в воду и выход из нее и др.). Для движения на воде в туннелях кормовой части корпуса смонтированы два четырехлопастных гребных винта правого вращения. Диаметр гребных винтов 700 мм, шаговое отношение 1,1. За гребными винтами скомпонованы водяные рули с приводом от штурвала, расположенного перед механиком-водителем. Максимальная тяга на швартовах транспортера с грузом 12 т 28,45 кН, при этом удельная тяга на швартовах, отнесенная к суммарной площади дисков гребных винтов, составляет 36,98 кН/м? при удельной эффективной мощности двигателя, отнесенной также к площади дисков винтов, 679,2 кВт/м? . Для удержания транспортера на курсе и совершения поворотов с большими диаметрами циркуляции (до 90 м) используются водяные рули, а для поворотов с малыми диаметрами циркуляции – работа гребных винтов «враздрай».  Рис. 12. Амфибийный буксировщик Для обеспечения живучести транспортера на воде в корпусе установлены два центробежных водооткачивающих насоса с суммарной подачей 1950 л/мин, а статический запас плавучести с грузом 12 т увеличен до 46 % от полного водоизмещения. Транспортер может успешно эксплуатироваться на реках со скоростью течения до 2,5 м/с и при волнении моря до 3 баллов (с морским оборудованием). Максимальная скорость движения транспортера на спокойной глубокой воде с грузом – 11,7 км/ч и без груза – 12,9 км/ч, при этом относительные скорости (числа Фруда по водоизмещению) составляют с грузом 0,57 и без груза – 0,630. Транспортер может преодолевать подьемы и спуски до 32 град и уверенно двигаться по местности. Среднее удельное давление на грунт гусениц транспортера с грузом 12 т- 63,4 кПа, без груза – 42,8 кПа. Максимальная скорость движения транспортера по шоссе – 60 км/ч, средняя по грунтовой дороге – 34 км/ч. Средний расход топлива на 100 км пути с грузом по грунтовой дороге не более 245 л, при движении по воде – 71 л/ч. Запасы хода по топливу составляют по шоссе или твердым грунтовым дорогам не менее 500 км, а на воде не менее 15 часов работы. Следует отметить, что транспортеры ПТС, ПТС-М и ПТС-2, кроме эксплуатации в армейских условиях, привлекались вместе с экипажами для проведения успешных спасательных работ в зонах наводнений во многих регионах страны. С помощью этих машин производилась эвакуация из зон затопления людей, скота и имущества, а также снабжение отрезанных водой населенных пунктов продовольствием, имуществом и оказание первой медицинской помощи пострадавшим людям. Транспортеры ПТС и ПТС-М привлекались в небольших количествах также для рейдовой разгрузки судов либо как транспортные средства, либо как амфибийные буксировщики несамоходных морских платформ на воздушной подушке грузоподъемностью 40 т. Опыт эксплуатации этих транспортеров Северным и Мурманским морскими пароходствами в процессе рейдовой разгрузки судов в период летней навигации по Северному Морскому Пути в течение ряда лет выявил положительные и отрицательные стороны этих машин как транспортных элементов рейдовой разгрузки судов-снабженцев. Поэтому Северное пароходство при участии других организаций Министерства морского флота разработало на базе транспортера ПТС-М морской вариант амфибийного буксировщикаплатформ на воздушной подушке (рис. 12). Эта модификация была более приспособлена для работы в морских условиях Заполярья, но также не была свободна от некоторых недостатков. Были начаты работы по созданию на базе ПТС-2 и ПТС-3 более мощных буксировщиков с увеличенной силой тяги на гаке как при движении по воде, так и по суше. Но эти работы были прекращены по ряду технических и нетехнических причин. Транспортер ПТС-М по просьбе некоторых заказчиков дооборудовался установкой гидроманипулятора для подъема со дна рек и озер затонувшей во время молевого сплава древесины. На дне рек севера-запада и северо-востока России лежит огромное количество затонувшей древесины, которая, с одной стороны, ухудшает экологию рек, а с другой стороны, является при разумном ее использовании хорошей сырьевой базой для различны х технологических процессов. Некоторое количество плавающих транспортеров с установленными в их корпусах гидроманипуляторами успешно работали, поднимая утонувшую древесину со дна рек северо-запада страны. Опыт эксплуатации в войсках ПТС- 2 в течение более 15 лет подтвердил рациональность и эффективность конструкции этого типа машин. Но вместе с тем выявились потребности улучшения некоторых параметров этого типа переправочно-десантного средства, в основном скорости движения на воде и грузоподъемности. Работы по созданию новой усовершенствованной модели ПТС-3 (рис. 13) проводились на заводе «Лугансктепловоз» под руководством главного конструктора Л.И.Позднякова. Эти работы привели к увеличению грузоподъемности на воде до 16 т, увеличению скорости движения транспортера с полной нагрузкой на воде до 15 км/ч, улучшению бронирования кабины управления, изменению конструкции движительно-рулевого комплекса и другим усовершенствованиям отдельных узлов и агрегатов. Базовыми стали агрегаты транспортера ПТС-2 при сохранении его общей схемы компоновки и моторной установки. Была несколько увеличена площадь грузовой платформы до 24 м? (8285 х 2890 мм). Собственная масса машины возросла до 25,8 т. Грузоподъемность на суше осталась такой же, как у ПТС-2. При мощности дизельного двигателя 522,5 кВт удельная мощность стала равной на суше 13,8 кВт/т, а на воде – 12,50 кВт/т. Несмотря на некоторое уменьшение удельной мощности на воде по сравнению с транспортером ПТС-2, максимальная скорость движения по воде была существенно увеличена. Это было достигнуто за счет отказа от использования гребных винтов в туннелях и установки двух гребных винтов диаметром 750 мм в направляющих насадках за кормовой частью корпуса. Для обеспечения управляемости на воде за каждым гребным винтом установлены сдвоенные водяные рули. При движении по суше гребные винты в насадках с помощью гидропривода поднимаются в верхнее транспортное положение к заднему откидному борту. При этом опускание и подъем заднего откидного борта для погрузочно-разгрузочных работ производится совместно с движительно-рулевым комплексом с помощью гидросистемы. Относительная скорость на воде (число Фруда по водоизмещению) стала равной 0,713, а тяга на швартовах 49,05 кН. При этом удельная тяга на швартовах, отнесенная к суммарной площади дисков гребных винтов, была равна 55,61 кН/м? . При движении по воде максимальная эффективная мощность двигателя, отнесенная также к суммарной площади гребных винтов, составляла 592,4 кВт/м? . Диаметр циркуляции при движении с максимальной скоростью при максимальной перекладке водяных рулей около 80 м. Остальное специальное оборудование аналогично транспортеру ПТС-2. 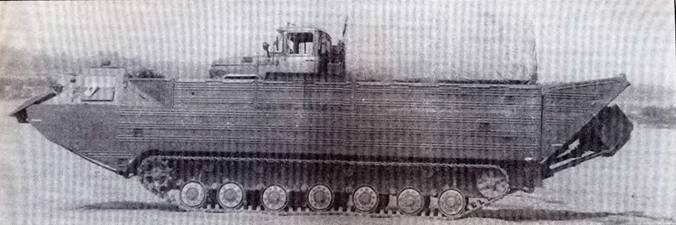 Рис. 13а. Плавающий транспортер ПТС-3 с автомобилем на грузовой платформе. Гребные винты в транспортном положении. 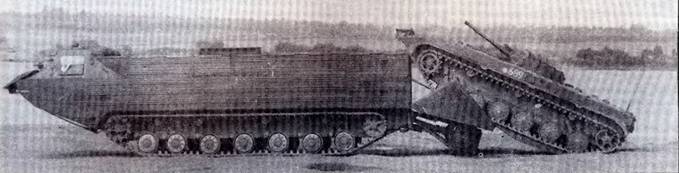 Рис. 136. Плавающий транспортер ПТС-3 с опущенным задним бортом, аппарелями и гребными винтами в направляющих насадках САМОХОДНЫЕ ПАРОМЫ ДЛЯ ПЕРЕПРАВЫ ТЯЖЕЛОЙ ТЕХНИКИ Решение проблемы переправы танков, САУ и другой тяжелой военной техники в период с 30-х годов до середины 50-х годов шло в основном по двум направлениям: – создание индивидуальных средств для переправы танков (съемные тканевые борта на каркасах, надувные емкости и металлические понтоны с использованием и без использования силовой установки переправляемых танков и другой техники); – создание средств, обеспечивающих многократную переправу танков без использования их силовых установок во время переправы и без какой- либо подготовки к ней переправляемых танков. Позднее создание переправочных средств для перевозки тяжелой техники и в особенности танков шло по второму направлению. При этом рассматривались различные технические решения по обеспечению плавучести и ходкости этих средств как водоизмещающих типов, так и с динамическими принципами поддержания: на воздушной подушке и с использованием подводных крыльев. Исследования показали, что при грузоподъемности парома на воздушной подушке, равной массе танка, требуется высокая энерговооруженность парома и секционирование его конструкции для транспортировки по суше. Все это приводит к значительному общему усложнению конструкции, к большому времени сборки парома и к увеличению обслуживающего расчета парома. При этом увеличивается также количество транспортных средств для перевозки элементов парома. Поэтому паром на воздушной подушке не удовлетворял требованиям, предъявляемым к десантному средству для переправы танков непосредственно за подразделениями первого эшелона. Паромы на подводных крыльях для увеличения скорости переправы танков на воде также не получили распространения из-за вероятности повреждения подводных крыльев при малых глубинах воды, достаточно большого времени разгона парома до выхода на крылья, значительной величины мощности силовой установки, необходимой для перевода парома из водоизмещающего режима в режим движения на подводных крыльях и, наконец, неэффективного использования увеличения скорости движения на воде на средних и узких по ширине реках, на которых время движения парома на воде не превышает 15 …20 % времени полного рейса. Перечисленные обстоятельства привели к тому, что развитие самоходных паромов для переправы танков свелось к использованию колесных и гусеничных амфибийных машин водоизмещающего типа. Вначале это был танконосец К-71 из двух полупаромов на базе двух гусеничных транспортеров К-61, разработанный в 1952 г. Но из-за недостаточной прочности испытаний он не выдержал. На опыте создания этого парома в 1956 г. в ОКБ инженерных войск под руководством А.Ф.Кравцева был спроектирован, изготовлен и испытан опытный образец самоходного гусеничного парома ГСП на базе узлов и агрегатов плавающего танка ПТ-76 и транспортера К-61. Промышленная подготовка к серийному выпуску парома ГСП на КВЗ осуществлялась последовательно под руководством главных конструкторов Р.И.Медведика и Е.Е.Ленциуса. Самоходный паром ГСП состоял из двух полупаромов (рис. 14а), каждый из которых имел основную машину и дополнительный понтон, размещенный на корпусе и опускаемый с помощью гидропривода в воду после стыковки двух полупаромов. Экипаж каждого полупарома – 3 человека. Основные технические характеристики ГСП следующие. Мощность двигателя каждого полупарома была равной 176,6 кВт при собственной массе полупарома 17,3 т. Скорость движения полупаромов на суше не превышала 40 км/ч. Суммарная грузоподъемность парома на воде достигала 52 т. На воде собранный паром с грузом 52 т мог двигаться по спокойной воде со скоростью 7-8 км/ч (рис.146), без груза -10 км/ч. При этом удельная мощность парома при движении с грузом по воде составляла 4,08 кВт/т, а число Фруда по водоизмещению -0,337. При движении по воде без груза удельная мощность возрастала до 10,2 кВт/т, а число Фруда – до 0,49. Движение по воде обеспечивалось работой четырех трехлопастных гребных винтов (по два на каждом полупароме) диаметром 600 мм. Винты имеют шаговое отношение 0,7 и дисковое отношение – 0,59. При этом удельная мощность, отнесенная к суммарной площади всех гребных винтов, составляет 312,45 кВт/м2 . Запас хода по топливу – 18-21 часов. 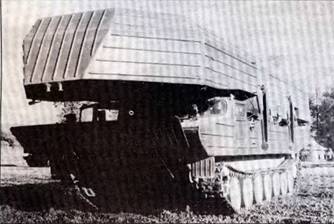 Рис. 14а Левый полупаром гусеничного самоходного парома ГСП  Рис. 14б. Гусеничный самоходный паром ГСП. Переправа через водную преграду танка с тралом. Длина парома – 12000 мм, ширина по лодкам – 12630 мм, ширина по раскрытым аппарелям – 21540 мм. Ширина проезжей части парома – 3540 мм. Дальнейшее развитие конструкции паромов для переправы тяжелой военной техники шло в направлении обеспечения переправы танков на пароме из одной машины с целью сокращения времени перевода парома из танспортного положения в рабочее (весьма важного показателя для обеспечения своевременного начала десантной переправы танков), сокращения обслуживающего расчета, уменьшения количества машин и, следовательно, длины походной колонны паромных машин в транспортном положениии. Были созданы самоходные паромы ПММ с колесной ходовой частью, ПММ-2 и ПММ-2М с гусеничной ходовой частью. Самоходный паром ПММ (рис. 15а) создавался в 1974 г. под руководством главного конструктора Е.Е.Ленциуса на КВЗ с использованием узлов и агрегатов колесной машины БАЗ-5937. Этот паром представляет собой плавающий автомобиль высокой проходимости с колесной формулой 8x8, оборудованный дополнительными емкостями (лодками) палубной конструкции с проезжей частью,'аппарельными и стыковыми устройствами. В транспортном положении для движения по суше лодки располагаются на корпусе ведущей машины одна над другой. После входа в воду лодки с помощью гидропривода опускаются в воду по бортам корпуса ведущей машины, образуя трехкорпусный паром необходимого водоизмещения (рис. 156). Ведущая машина оборудована дизельным двигателем мощностью 220,8 кВт. Общая масса парома – 26 т, грузоподъемность – 40 т. Максимальные скорости движения по шоссе 59 км/ч, на воде с грузом 40 т – до 10 км/ч (число Фруда 0,44) при удельной мощности 3,34 кВт/т и без груза – 11,5 км/ч (число Фруда 0,592) при удельной мощности 8,49 кВт/т. Корпус ведущей машины – закрытого типа цельносварной конструкции из алюминиевого сплава – имеет трехместную закрытую кабину из стеклопластика и проезжую часть, на которой размещается перевозимая техника. Машина имеет внутрипаромные и межпаромные стыковые устройства для соединения лодок и корпуса ведущей машины и образования парома с единой проезжей частью, а также для соединения нескольких паромов между собой с целью образования парома с увеличенной грузоподъемностью или наплавного моста. Движение на воде обеспечивается убирающимися движительно-рулевыми устройствами в виде двух гребных винтов диаметром 600 мм в направляющих насадках с водяными рулями. Тяга винтов в швартовном режиме составляет 17,66 кН. Удельная тяга гребных винтов на швартовах, отнесенная к площади дисков гребных винтов, равна 31,25 кН/м2 , а удельная мощность, также отнесенная к суммарной площади дисков гребных винтов, составляет 390,65 кВт/м2 . Для удаления забортной воды, проникшей в корпуса парома, последний имеет три центробежных насоса с суммарной подачей 1840 л/мин. Экипаж машины в составе трех человек переводит машину из транспортного положения в рабочее в течение трех минут. В целом колесная машина ПММ обладала достаточно удовлетворительной совокупностью сухопутных и водоходных качеств, но, к сожалению, испытания этого парома выявили его низкую проходимость на входах и выходах из воды и неудовлетворительную ремонтнопригодность корпуса из алюминиевого сплава в полевых условиях. Кроме того, у этого парома, как и у других типов паромов, была недостаточная скорость движения на воде из-за большого сопротивления воды, обусловленного значительными заглублениями корпуса и ходовой части в воду. Большая осадка паромов по ходовой части затрудняла также погрузку и выгрузку танков и другой тяжелой военной техники в условиях малых уклонов дна у берегов.  Рис. 15а. Колесная паромно-мостовая машина ПММ в транспортном положении  Рис. 156. Колесно-паромная машина ПММ с опущенными дополнительными лодками Расчеты и испытания показали, что грузоподъемность парома из одной машины не соответствует возрастающей массе танков и другой военной техники, а возможность дальнейшего увеличения грузоподъемности одномашинных паромов исчерпана по условиям транспортирования их по железной дороге и ограничения грузоподъемности базовых шасси. Применение же двойного парома для переправы одного танка неэффективно по тактико-эхономическим показателям, в частности в связи с существенным недоиспользованием грузоподъемности паромов из двух машин и увеличением количества машин вдвое. Опыт эксплуатации парома ПММ был учтен в конструкциях последующих самоходных паромов. Они имели стальные корпуса, гусеничную ходовую часть, более мощные дизельные двигатели, что в совокупности значительно улучшило проходимость паромов при входах в воду и выходе из нее. Несмотря на увеличение водоизмещения и осадки гусеничных самоходных паромов удалось сохранить скорость их движения на воде на прежнем уровне благодаря отказу от гребных винтов, расположенных в туннелях корпуса. На этих машинах использовались гребные винты увеличенных диаметров в направляющих насадках с установкой их в рабочее положение за кормой корпуса по типу транспортера ПТС-3. Самоходные гусеничные паромы ПММ-2 (рис. 16а) и ПММ-2М (рис.16б) разрабатывались на базе транспортера ПТС-2 на КВЗ под руководством главного конструктора Е.Е.Ленциуса. Паром состоит из гусеничного плавающего транспортера с водонепроницаемым корпусом палубной конструкции, соединенных шарнирно с корпусом транспортера двух дополнительных понтонов с аппарелями, стыковыми устройствами и проезжими частями. Схема расположения понтонов с аппарелями в транспортном положении на суше и в рабочем положении перед входом в воду и на воде аналогична схеме паромно-мостовой машины ПММ. Паром имеет трехместную кабину с фильтровентиляционной установкой и средствами внутренней и внешней связи, водоходный движительно-рулевой комплекс, якорно-швартовное оборудование, водооткачивающую систему, унифицированное автоматизированное противопожарное оборудование, комплект для дегазации и дезактивации и др. Экипаж парома – три человека. Собственная масса парома ПММ-2М была равна 36 т при грузоподъемности на воде 42,5 т (а у ПММ-2 грузоподъемность – 40 т), поэтому коэффициент использования массы составлял 1,18. Это свидетельствует о рациональности конструкции парома, так как паром может транспортировать груз большей массы, чем его собственная. Общая схема компоновки основной ведущей машины была аналогична компоновке ПТС-2 с двигателем такой же мощности в 522,5 кВт, которая более чем в два раза была больше мощности двигателя ПММ. Но это не привело к существенному увеличению скорости движения на воде и удельной мощности парома из-за роста его собственной массы. Удельная мощность парома на воде была относительно небольшой – 6,87 кВт/т. При движении по суше удельная мощность парома была больше и достигала 14,51 кВт/ т, обеспечивая движение по дорогам с максимальной скоростью 55 км/ч. Среднее давление гусениц на грунт 64,0 кПа. Дорожный просвет – 400 мм. Наименьший радиус поворота на суше – 2,75 м, диаметр циркуляции на воде – 28 м. Водоходными движителями ведущей машины парома являлись два четырехлопастных гребных винта диаметром 650 мм в направляющих насадках, скомпонованных за кормой корпуса. Шаговое отношение гребных винтов было равно 0,90. Тяга на швартовах – 32,37 кН. Удельная мощность парома, приведенная к суммарной площади дисков гребных винтов, составляла 813,6 кВт/м? , а удельная тяга на швартовах – 50,4 кН/м2 . При этом обеспечивалось движение на воде без груза со скоростью 12,8 км/ч (число Фруда 0,63) и с грузом – 10,98 км/ч (число Фруда 0,47). Максимальное волнение водной поверхности, при котором обеспечивается работоспособность машины – до 2 баллов. Из нескольких самоходных паромов ПММ-2 могут быть образованы паромы с увеличенными грузоподъемностями и погрузочными длинами (из двух – паром грузоподъемностью 80 т и длиной 20 м, из трех-120т и длиной 30 м). Модернизированный самоходный паром из двух машин ПММ-2М имеет грузоподъемность – 85 т, из трех машин -127,5 т.  Рис. 16а. Гусеничная паромно-мостовая машина ПММ-2 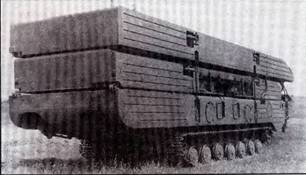 Рис. 166. Гусеничная паромно-мостовая машина ПММ-2М  Рис. 17. Мотор-весло МВ-72 ДЕСАНТНЫЕ ЛОДКИ Специально приспособленные для десантной переправы табельные лодки начали поступать в армию примерно в 1927 г. с появлением надувной лодки А-2, а позднее А-3 . Массовое применение десантных лодок осуществлялось в Отечественную войну, за время которой промышленностью было изготовлено и поставлено на различные фронты 52577 десантных лодок, в том числе 24832 десантных складных лодок и надувных – 27745. На ряде фронтов было организовано изготовление в больших количествах саперных деревянных лодок силами войск. Десантные лодки на протяжении всей войны являлись необходимым и наиболее распространенным средством форсирования водных преград. Во многих случаях лодки из чисто пехотного переправочного средства становились пехотно-артиллерийскими с увеличенной грузоподъемностью и возможностью использования в качестве опор в легких паромах с пролетным строением из подручных материалов. Десантные лодки достаточно часто являются единственным средством, обеспечивающим успех форсирования, особенно при форсировании с развертыванием главных сил у водной преграды. Этим объясняется наличие до сих пор десантных лодок наряду с паромно-мостовыми средствами не только в нашей армии, но и в комплектах переправочных средств армий США, Германии, Англии, Франции, Италии и других стран. Десантные лодки вследствие сравнительно высокой скорости (если используются подвесные моторы), малых габаритов и высокой транспортабельности эффективны при форсировании, когда для обеспечения минимальных потерь, требуется скрытность подготовки, внезапность, высокие темпы форсирования и возможность рассредоточения переправочных средств по зеркалу водной преграды по фронту и глубине. Этого во многих случаях не могут обеспечить плавающие транспортеры и самоходные паромы, которые представляют собой сравнительно крупные цели, уязвимые от огневых средств противника как на самой водной преграде, так и при подходе к ней. Значение десантных лодок возрастает при форсировании широких и очень широких водных преград, а также водных преград в условиях, исключающих или затрудняющих возможность применения плавающих боевых машин и бронетранспортров по береговым условиям, при высоких скоростях течения, труднопроходимых поймах и т.д. Поэтому десантная лодка по современным взглядам должна иметь вместимость на одно мотострелковое отделение, скорость с полной нагрузкой не менее 15 км/ч, непотопляемую конструкцию, обладать долговечностью и высокой сохраняемостью. Кроме того, лодки должны позволять переносить их переправляющимися подразделениями, транспортировать их на армейских автомобилях с погрузкой-выгрузкой вручную, использовать их в качестве плавучих опор в легких паромах для переправы санитарных автомобилей и др. Практически все известные отечественные лодки, начиная с 30-х годов, обладали в разной степени названными выше качествами. В конструкции лодок прослеживается тенденция обеспечения непотопляемости, возможно высоких скоростных качеств и малой осадки, а также высокой транспортабельности. До конца войны передвижение лодок в основном осуществлялось веслами. Разработанные в 1943 г. мотор-весло МВ-72 (рис. 17) с использованием мотоциклетного двигателя и легкое мотор-весло MB-180 с использованием двигателя от бензопилы получили ограниченное распространение из-за отсутствия массового производства. В послевоенные годы все создаваемые лодки обеспечивали возможность применения на них серийных отечественных подвесных лодочных моторов, но, к сожалению, диапазон мощностей этих моторов был небольшим. Выбор лодочного мотора представляет собой результат компромиссных решений, учитывающих возможность крупносерийного производства, приемлемую массу мотора (позволяющую использовать его на лодке и переносить вручную переправляющимся десантом), соответствие характеристик гребного винта мотора сопротивлению движения лодки с полной нагрузкой, наличие реверса для обеспечения заднего хода и торможения, надежность работы гребного винта в условиях мелководья и засоренной акватории. В разные годы исследовалась возможность применения на лодочном моторе трехлопастного гребного винта в направляющей насадке для достижения возможно больших скоростей движения и защиты самого гребного винта, приспособление надувных лодок за счет различных устройств к движению в режиме глиссирования с более высокими скоростями при возвращении лодок без нагрузки к исходному берегу, меры по повышению живучести десантных лодок и др. Десантная лодка А-3 имеет грузоподъемность 3200 кг и вместимость до 30 человек, в том числе 3 человека расчета лодки. Масса полного комплекта без днища – 180 кг. Габаритные размеры лодки в рабочем (транспортном) положении: длина – 6000 мм (2300 мм), ширина – 2300 мм (700 мм), высота (диаметр) борта – 850 мм (500 мм). Лодка имеет отсеки. Скорость движения на веслах – 3…3.5 км/ч. Грузоподъемность парома с верхним строением из подручных материалов в составе двух лодок – 5000 кг, в составе трех лодок – 7000 кг.  Рис. 18а и б. Десантная лодка ДЛ-10 и подвесной мотор "Циклон"  Рис. 19. Десантная лодка НЛ-8  Рис. 20. Лодка НЛ-15  Рис. 21а. Лодка СНЛ-8  Рис. 21 б. Лодка СНЛ-8 Саперная деревянная лодка СДЛ начала разрабатываться в 1932 г., и ее конструкция была рассчитана на изготовление силами войск в качестве резервного десантного средства. Лодка представляла собой досчатую плоскодонную конструкцию, грузоподъемностью 2000 кг. На изготовление одной лодки саперное отделение затрачивало примерно восемь рабочих часов. Масса лодки – 280…300 кг, а габаритные размеры: длина – 6800 мм, ширина – 1500 мм, высота – 480 мм. Лодка могла вмещать 15 человек вместе с тремя человеками расчета лодки. Скорость движения на веслах по спокойной воде с полной нагрузкой – 4…4,5 км/ч. Из лодок можно было собирать паромы различной грузоподъемности. Грузоподъемость парома из двух лодок достигала 2500 кг, из трех лодок – 3500 кг. На этих паромах можно было перевозить как личный состав, так и артиллерийские системы различных калибров. Опыт боевых действий с форсированием водных преград на Карельском перешейке в декабре 1939 г. выявил недостатки лодки А-3 и особенно ее малую живучесть под огнем противника. Поэтому была создана десантная складная лодка ДСЛ. Масса лодки составляла 160… 180 кг, вместимость -15 человек, скорость движения на веслах – 5 км/ч, с мотор-веслом MB-180 – 9 км/ч. Обшивка лодки была выполнена из фанерных листов толщиной 4…5 мм на деревянном каркасе с трубчатыми распорками. Размеры лодки с двумя отсеками в рабочем (транспортном) положении : длина – 5500 мм (2900 мм), ширина – 1500 мм (1200 мм), высота – 530 мм (150 мм). Грузоподъемность парома из двух лодок составляла 2000 кг, из трех лодок – 3000 кг. Лодки ДСЛ хорошо зарекомендовали себя во время Великой Отечественной войны из-за быстроты снаряжения (2…3 мин), возможности подноски к воде на руках, удобства размещения десанта и скорости движения. Вместе с тем прочность лодки и ее грузоподъемность не были приемлемыми при перевозке средних артиллерийских систем и их тягачей. Поэтому работы по созданию более совершенных и эффективных десантных лодок были продолжены и привели к созданию нескольких новых складных и надувных лодок, из которых следует выделить надувную десантную лодку НДЛ -10 (1952 г.), десантную лодку ДЛ-10 (рис.18 а,б), надувные лодки НЛ-8 (рис.19) и НЛ-15 (1965 г.,рис.20) и скоростную надувную лодку СНЛ-8 (рис.21 а,б). Все перечисленные лодки были рассчитаны на перевозку 8… 15 человек и только лодка ДЛ-10 вмещала 24 человека, поскольку ее грузоподъемность была увеличена до 3000 кг. Это позволило увеличить грузоподъемность паромов, образуемых из этих лодок. При использовании двух лодок грузоподъемность парома достигала 4000 кг, при использовании трех лодок – 6000 кг. Скорости движения этих лодок с нагрузкой (десантом) лежали в пределах от 4 до 7 км/ч на веслах. При использовании подвесных моторов – от 10 км/ч у лодки НЛ-8 до 14 км/ч у лодки СНЛ-8. У большинства надувных лодок в качестве материала корпуса использовались однослойные или двухслойные прорезиненные ткани на капроновой основе с образованием 5…8 герметичных отсеков. |
|
||
|
Главная | Контакты | Нашёл ошибку | Прислать материал | Добавить в избранное |
||||
|
|
||||