|
||||
|
|
Аварийная посадка при заклиненном общем шаге несущего винта   И.К. Тощигин - канд. техн. наук доцент, старший научный сотрудник, начальник кафедры аэродоинамики и динамики полета СВВАУЛ  В.В. Безнощенко - канд. техн. наук доцент, заместитель начальника кафедры аэродинамики и динамики полета СВВАУЛ Случаи, в которых происходит заклинивание общего шага несущего пинта СНВ), в летной практике возникают нередко. Причиной отказа управления общим шагом могут явиться попавшие в проводку управления посторонние предметы, разрушение узлов проводки, больше повреждения и другие причины. Особенностью такого отказа является то, что при нем сохраняется возможность продолжения полота с той скоростью, которая зависит от балансировочного по ложе ни я общего шага. Как известно, балансировочное положение рычага “шаг- газ" соответствует двум скоростям: мерного и второго режимов установившегося горизонтального полета. Переход со скорости одного режима на скорость другого не представляет сложности и не требует большого запаса высоты. В дан ной аварийной ситуации полет следует продолжать на скорости первого режима, так как выполнение установившегося горизонтального полета на скорости второго режима с заклиненным общим шагом НВ, по меньшей мере, затруднительно. Основную сложность в нештатной ситуации представляет процесс предпосадочного снижения с одновременным гашением скорости, а также выполнение самой посадки. При этом одновременное гашение поступательной и вертикальной скоростей перед приземлением крайне сложно. При уменьшении скорости увеличивается дефицит мощности, подводи мой к НВ, что приводит к увеличению вертикальной скорости снижения. По пытка уменьшить вертикальную скорость увеличением угла тангажа приводит к уменьшению поступательной скорости и дальнейшему увеличению дефицита мощности, а следовательно, к дальнейшему увеличению вертикальной скорости снижения. Конечно, можно погасить и поступательную, и вертикальную скорости одновременно за счет ис пользования кинетической энергии вертолета и энергии вращения ТТВ, но такой способ посадки требует исключительно точного расчета, а но сложности выполнения сопоставим с посадкой на режиме самовращения несущего винта. 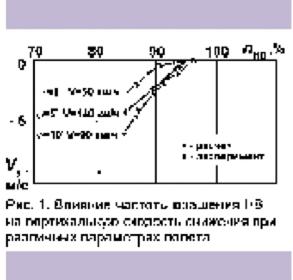 Как правило, в подобном положении летчики выполняют посадку на скоростях. близких к экономической (около 100-120 км/ч). При наличии хорошо подготовленной взлетно посадочной полосы это возможно, хотя и сложнее обычного приземления ио-самолетному. Во-первых, посадка на повышенной скорости требует от пилога значительно более точного расчета и нестандартной техники пилотирования. Во-вторых, при раннем опускании носового колеса могут развиться автоколебания передней стойки шасси типа «шимми». В-третьих, если заклинивание общего шага произошло из- за отказа авиационной техники или бое вого повреждения, может потребоваться экстренная посадка на неподготовленную площадку, что создает угрозу авиационного происшествия. В ряде случаев командир экипажа, предприняв несколько безуспешных попыток выполнения по садки на повышенной скорости, набирал высоту и принимал решение покинуть вертолет. Все вышесказанное побудило авторов предпринять попытку исследования возможности иных вариантов посад ки с заклиненным общим шагом, которые не требовали бы приземления на чрезмерно высоких скоростях. В процессе посадки летчик меняет величину тяги с помощью изменения общего шага НВ. При этом мощность, передаваемая на НВ, изменяется таким образом, чтобы частота вращения его оставалась постоянной. При заклиненном управлении общим шагом летчик не может использовать традиционный способ изменения тяги НВ. Поэтому остается один путь - изменять величину тяги НВ путем изменения его оборотов за счет изменения мощности, подводимой от силовой установки. В этом случае летчику необходимо перейти па ручное управление мощностью с помощью рычагов раздельного управления двигателями (РРУД). Авторами была разработана математическая модель, позволяющая исследовать характеристики НВ на различных скоростях полета с заклиненным общим шагом при различных его оборотах. Был получен целый ряд зависимостей, которые частично приведены в данной статье в виде рисунков. Надежность полученных результатов требовала дополнительной проверки. В рамках Сызранского высшего военного авиационного училища летчиков (СВВЛУЛ) организовать исследовательские полеты на реальных вертолетах не удалось. Выход был найден в использовании для этой цели пилотажного тренажера летчика НТВ 241, имеющегося на кафедре аэродинамики и динамики полета. Преподавателем кафедры летчиком 1 класса подполковником С. И. Брыкаловым была проведена серия исследовательских полетов на тренажере, которые подтвердили данные теоретических разработок, а также позволили сформулировать предположительные рекомендации по выполнению посадки с заклиненным общим шагом НВ. Из зависимостей, представленных на рис.1, видно, что, не допуская падения оборотов несущего винта ниже 86%. можно выполнить снижение с вертикальной скоростью от 2-3 до 7 м/с. При этом зависимость Vy = f(Nнв) мало отличается от линейной. На рис. 2 показаны характеристики установившуюся горизонтального полета Ми-24 с зафиксированным при различных значениях шагом НВ. Видно, что с увеличением угла, при котором заклинен общий шаг НВ, расширяется диапазон возможных скоростей установившегося горизонтального полета и. следовательно, улучшаются условия по посадке предлагаемым методом. Например, при заклинивании общего шага на 10° возможно зависание вертолета с числом оборотов НВ, равным 90% от номинального, с последующим вертикальным приземлением. При заклинивании на малом шаге расширить диапазон скоростей полета можно с помощью изменения оборотов НВ. 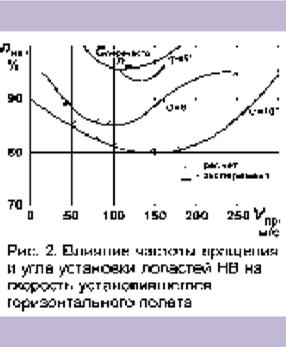 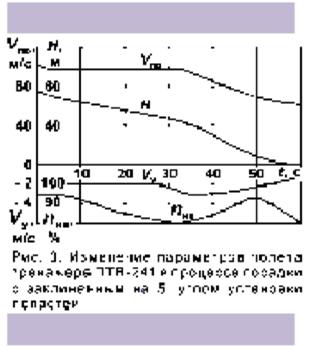 Теоретические и тренажерные исследования обнаружили возможность приземления по-вертолетному при заклинивании шага на скоростях, близких к максимальной, и нормальной посадки по самолетному при заклинивании шага на экономичной скорости. Отсутствие результатов летных испытаний не позволяет давать рекомендации летному составу по действиям в случае возникновения рассматриваемой аварийной ситуации. Тем не менее, уже на данном этапе исследований авторы могут высказать некоторые соображения об особенностях данного вида посадки. 1. Глиссада захода на посадку должна быть более пологой, чем при обычной посадке. 2. При заклинивании рычага "шаг-газ" во время полета в сложных метеорологических условиях снижение под облака следует выполнять только на скоростях первого режима. 3. Все действия, связанные с управлением оборотами НВ. следует предпринимать только в визуальном полете, желательно - в непосредственной видимости посадочной площадки. В противном случае при регулировании оборотов НВ летчик может уменьшить их значение до величины, при которой произойдет отключение генераторов, что, в свою очередь, приведет к отключению ряда пилотажно навигационных приборов и создаст предпосылку потери пилотом пространственной ориентировки. 1. При заклинивании рычага "шаг-газа" на режиме планирования возможно уменьшение скорости и вплоть до перевода вертолета в горизонтальный полет перенастройкой оборотов НВ до максимального значения. 5. При уменьшении угла заклинивания общего шага условия посадки ухудшаются. Самым опасным по последствиям случаем является заклинивание общего шага при снижении на режиме самовращения, когда значения углов установки лопастей НВ близки к минимальным. В такой ситуации при наличии запаса высоты экипажу желательно покинуть вертолет. В результате полетов па тренажере ПТВ-241 наиболее целесообразным признан следующий сценарий посадки: определить минимальную скорость горизонтального полета второго режима при максимально допустимых оборотах НВ и не допускать ее снижения при заходе на посадку; - установить скорость полета 80 100 км/ч с помощью РРУД (в любом случае скорость не должна быть ниже минимально допустимой скорости установившегося горизонтального попета для данного значения шага НВ; чем меньше шаг, тем больше минимально допустимая скорость); - с помощью РРУД плавно установить вертикальную скорость снижения 1-2 м/с; снижаться до высоты 15-20 м; на высоте 15 20 м плавным взятием РРУД вверх уменьшить вертикальную скорость снижения до 0,2-0,5 м/с; - на высоте 1-2 м движением РРУД вниз приземлить вертолет, после приземления РРУД полностью опустить вниз. На рис.5 приведены зависимости скорости полета V, высоты Н и вертикальной скорости Vy оборотов несущего винта Пнв от времени t при выполнении посадки с шагом HR, заклиненным на режиме моторного планирования. Это один из наиболее опасных случаев при заклинивании общего шага на S°, исследованных в полете па тренажере. Видно, что вертолет произвел посадку по-самолетному при скорости 65-70 км/ч, что соответствует норме и обеспечивает безопасность полета. Скорость вертикального снижения в момент касания земли не превышала 1 м/с. При этом техника пилотирования оказалась не сложнее техники пилотирования при выполнении обычной посадки по самолетному и не потребовала от летчика каких-либо новых навыков. Таким образом, отказавшись от традиционного желания летчика в любой ситуации сохранить обороты НВ не меньше минимально допустимых инструкцией, авторы предлагают порядок действий, который позволяет экипажу выполнить безопасную посадку в аварийной ситуа ции, связанной с заклиниванием в полете общего шага НВ. Рассмотренный порядок действий при посадке вертолета с заклиненным управлением общим шагом НВ, вероятно, применим и для других вертолетов, на которых имеется ручное управление мощностью силовой установки. ЭКОНОМИКА  |
|
||
|
Главная | Контакты | Нашёл ошибку | Прислать материал | Добавить в избранное |
||||
|
|
||||